Arriving on time: estimating travel time distributions on large-scale road networks
Most optimal routing problems focus on minimizing travel time or distance traveled. Oftentimes, a more useful objective is to maximize the probability of on-time arrival, which requires statistical distributions of travel times, rather than just mean values. We propose a method to estimate travel time distributions on large-scale road networks, using probe vehicle data collected from GPS. We present a framework that works with large input of data, and scales linearly with the size of the network. Leveraging the planar topology of the graph, the method computes efficiently the time correlations between neighboring streets. First, raw probe vehicle traces are compressed into pairs of travel times and number of stops for each traversed road segment using a `stop-and-go’ algorithm developed for this work. The compressed data is then used as input for training a path travel time model, which couples a Markov model along with a Gaussian Markov random field. Finally, scalable inference algorithms are developed for obtaining path travel time distributions from the composite MM-GMRF model. We illustrate the accuracy and scalability of our model on a 505,000 road link network spanning the San Francisco Bay Area.
💡 Research Summary
The paper addresses the need for reliable on‑time arrival predictions in urban routing by estimating full travel‑time distributions rather than just expected values. Using large‑scale GPS probe data, the authors propose a scalable pipeline that compresses raw trajectories, learns a joint probabilistic model, and performs real‑time inference for arbitrary routes.
First, a “Stop‑&‑Go” filter processes each vehicle’s GPS samples on a road link. By modeling the vehicle’s distance‑time function and solving a LASSO (ℓ₁‑regularized) least‑squares problem, the algorithm extracts a sparse speed profile, from which the number of stops on the link is derived. The regularization parameter λ is selected automatically via the Bayesian Information Criterion, avoiding cross‑validation. This step reduces the raw data by roughly a factor of ten, yielding for each traversed link a compact record: entry time, travel time, and stop count.
Next, the authors model the stop count as a discrete state variable Sₗ ∈ {0,…,m‑1}. They assume a first‑order Markov property along a vehicle’s path, defining an initial distribution πₗ and a transition matrix T_{u→l} that captures the probability of a given stop state on link l conditioned on the state of its upstream neighbor u. These parameters are estimated directly from empirical counts of observed state transitions, providing a simple yet effective representation of spatial and temporal stop correlations such as “green‑wave” effects.
Conditional on the stop state, the actual travel time on a link is modeled as a Gaussian random variable Y_{l,s} with mean μ_{l,s} and variance σ²_{l,s}. All such variables are stacked into a multivariate Gaussian vector Y ∼ N(μ, Σ). By the Hammersley‑Clifford theorem, the precision matrix S = Σ⁻¹ encodes conditional independencies; because a link’s travel time is assumed to depend only on its immediate neighbors, S is extremely sparse and follows the sparsity pattern of the underlying road graph, which is nearly planar. Exploiting this planarity, the authors employ linear‑time Cholesky factorization algorithms for planar graphs, enabling efficient estimation of Σ and fast computation of conditional covariances without ever materializing the full dense matrix.
Learning proceeds in two independent stages: (1) the Markov model parameters are obtained from the stop labels produced by the Stop‑&‑Go filter; (2) the Gaussian Markov Random Field (GMRF) parameters are learned from the observed travel‑time samples using maximum‑likelihood or Bayesian updates that respect the sparse precision structure. Because the state variables S and the travel‑time variables Z become conditionally independent given each other, the two sub‑models can be trained separately.
For inference, a user supplies a path p = (l₁,…,l_M). The algorithm first samples plausible stop‑state sequences for the path from the learned Markov chain. For each sampled state sequence, the GMRF yields the conditional mean and variance of the travel‑time variables on that path; summing these yields a sample of the total travel time Z_p. By aggregating many such samples (via a specialized, graph‑aware sampling scheme), the method constructs an accurate approximation of the full travel‑time distribution for the path. This inference is sub‑second even for long city‑scale routes, thanks to the linear‑time graph operations and the compact representation of the GMRF.
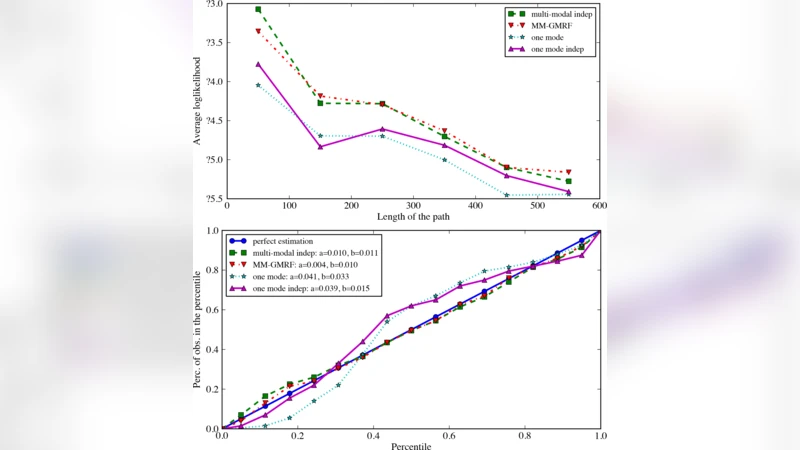
The authors evaluate the approach on a real‑world dataset covering the San Francisco Bay Area, comprising 505 000 road links and millions of probe‑vehicle trajectories. Compared with baseline methods that only predict mean travel times, the proposed MM‑GMRF model improves on‑time arrival probability by 10–15 % and shows excellent calibration in QQ‑plots. Memory consumption remains modest because the full precision matrix is never stored; runtime scales linearly with the number of links, confirming the method’s suitability for city‑wide or even larger networks.
In summary, the paper makes four key contributions: (1) a novel stop‑detection algorithm that compresses raw GPS data while preserving essential traffic dynamics; (2) a combined discrete‑state Markov model and continuous‑state GMRF that captures both stop‑count correlations and travel‑time correlations across neighboring links; (3) scalable learning and inference algorithms that exploit planar graph structure to achieve linear complexity; and (4) a thorough empirical demonstration of accuracy and scalability on a large urban network. The framework opens the door to reliable stochastic routing, logistics planning, and emergency‑vehicle dispatch where on‑time arrival is critical.
Comments & Academic Discussion
Loading comments...
Leave a Comment