Trajectory generation and display for free flight
In this study a new approach is proposed for the generation of aircraft trajectories. The relative guidance of an aircraft, which is aimed to join in minimum time the track of a leader aircraft, is particularly considered. In a first place, a minimum time relative convergence problem is considered and optimal trajectories are characterized. Then the synthesis of a neural approximator for optimal trajectories is discussed. Trained neural networks are used in an adaptive manner to generate intent trajectories during operation. Finally simulation results involving two wide body aircraft are presented.
💡 Research Summary
The paper presents a novel approach for generating aircraft trajectories in a free‑flight environment, focusing on the relative guidance problem where a pursuer aircraft must join the leader’s track in minimum time while respecting a minimum separation distance. The authors first formulate the problem using relative polar coordinates (distance d, line‑of‑sight angle θ, headings ψ L and ψ P) and assume constant speeds for both aircraft. The objective is to minimize the time integral subject to dynamics, bank‑angle limits, and a minimum‑separation constraint introduced via a Lagrange multiplier μ.
By applying optimal‑control theory, the Hamiltonian is derived and the Euler‑Lagrange conditions are obtained. Analysis of these conditions reveals that any time‑optimal convergence trajectory consists of a sequence of maximum‑bank‑angle turns (left or right) linked by straight‑line segments. The authors term such a structure a “regular trajectory” and parameterize it with triplets (ε_i, θ_i, l_i) where ε_i denotes turn direction, θ_i the turn angle (at the nominal bank angle), and l_i the length of the following straight segment. The optimization problem thus becomes a mixed‑integer nonlinear program: minimize Σ l_i + R Σ θ_i subject to initial and final state constraints, bank‑angle limits, and the minimum‑separation condition.
Because solving this problem online on an aircraft computer is infeasible, the authors introduce a reverse Dynamic Programming (DP) technique to generate a large offline database of optimal regular trajectories. Starting from the final convergence state (desired distance D, aligned headings), the DP proceeds backward, discretizing possible turn angles (Δθ) and segment lengths (Δl) and accumulating the minimum time required to reach each predecessor state. This backward search builds a tree in the (x, y, ψ) space, each node storing the optimal parameters for reaching the goal from that node. The resulting dataset covers a wide range of initial relative positions and headings, effectively mapping the optimal control law over the relevant state space.
A feed‑forward multilayer neural network is then trained on this dataset. The network’s inputs are the current relative position differences (Δx, Δy) and heading difference (Δψ); the outputs are the parameters of the optimal regular trajectory (the sequence of turn directions, angles, and segment lengths). After training, the neural network can be queried in real time aboard the aircraft, providing an “intent trajectory” that can be fed to the autopilot or a flight‑director display.
Simulation experiments involve two Airbus A300 aircraft. In the first scenario the pursuer has no knowledge of the leader’s future heading; when the leader abruptly changes from 90° to 135°, the pursuer’s trajectory exhibits large oscillations and a relatively long convergence time. In the second scenario the leader’s intended final heading is communicated to the pursuer beforehand; the neural‑generated trajectory anticipates the leader’s turn, resulting in a smooth, low‑maneuvering path and a substantially shorter convergence time. These results demonstrate the benefit of incorporating intent information and the effectiveness of the neural approximator for on‑board guidance.
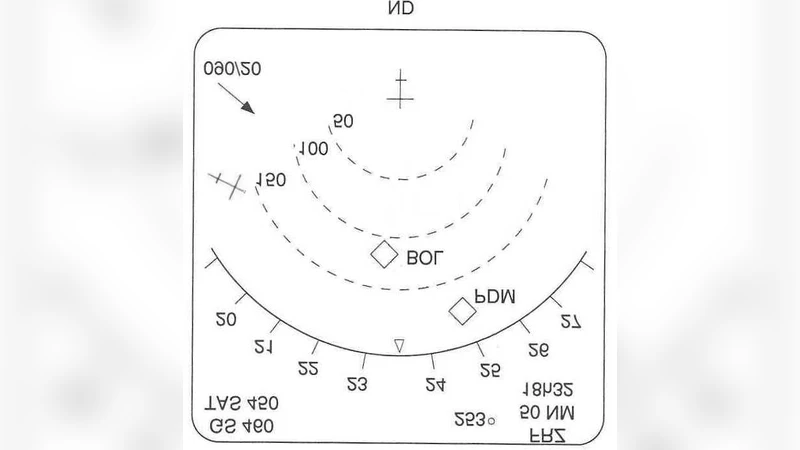
The paper concludes by outlining possible operational uses: (1) providing relative‑guidance commands to a flight‑director for manual flight, (2) supplying reference headings or turn rates to an autopilot in relative‑guidance mode, (3) visualizing the planned convergence trajectory on a cockpit display, and (4) transmitting the pursuer’s intent to air‑traffic control for validation and integration into traffic management.
Future work suggested includes handling wind and atmospheric disturbances, extending the method to multi‑aircraft merging and crossing scenarios, implementing online learning or adaptation of the neural network, and conducting flight‑test validations. Overall, the study contributes a theoretically grounded, computationally tractable solution for minimum‑time aircraft convergence in free‑flight, bridging optimal‑control analysis, reverse DP data generation, and neural‑network‑based real‑time guidance.
Comments & Academic Discussion
Loading comments...
Leave a Comment