Symbolic control of stochastic systems via approximately bisimilar finite abstractions
Symbolic approaches to the control design over complex systems employ the construction of finite-state models that are related to the original control systems, then use techniques from finite-state synthesis to compute controllers satisfying specifications given in a temporal logic, and finally translate the synthesized schemes back as controllers for the concrete complex systems. Such approaches have been successfully developed and implemented for the synthesis of controllers over non-probabilistic control systems. In this paper, we extend the technique to probabilistic control systems modeled by controlled stochastic differential equations. We show that for every stochastic control system satisfying a probabilistic variant of incremental input-to-state stability, and for every given precision $\varepsilon>0$, a finite-state transition system can be constructed, which is $\varepsilon$-approximately bisimilar (in the sense of moments) to the original stochastic control system. Moreover, we provide results relating stochastic control systems to their corresponding finite-state transition systems in terms of probabilistic bisimulation relations known in the literature. We demonstrate the effectiveness of the construction by synthesizing controllers for stochastic control systems over rich specifications expressed in linear temporal logic. The discussed technique enables a new, automated, correct-by-construction controller synthesis approach for stochastic control systems, which are common mathematical models employed in many safety critical systems subject to structured uncertainty and are thus relevant for cyber-physical applications.
💡 Research Summary
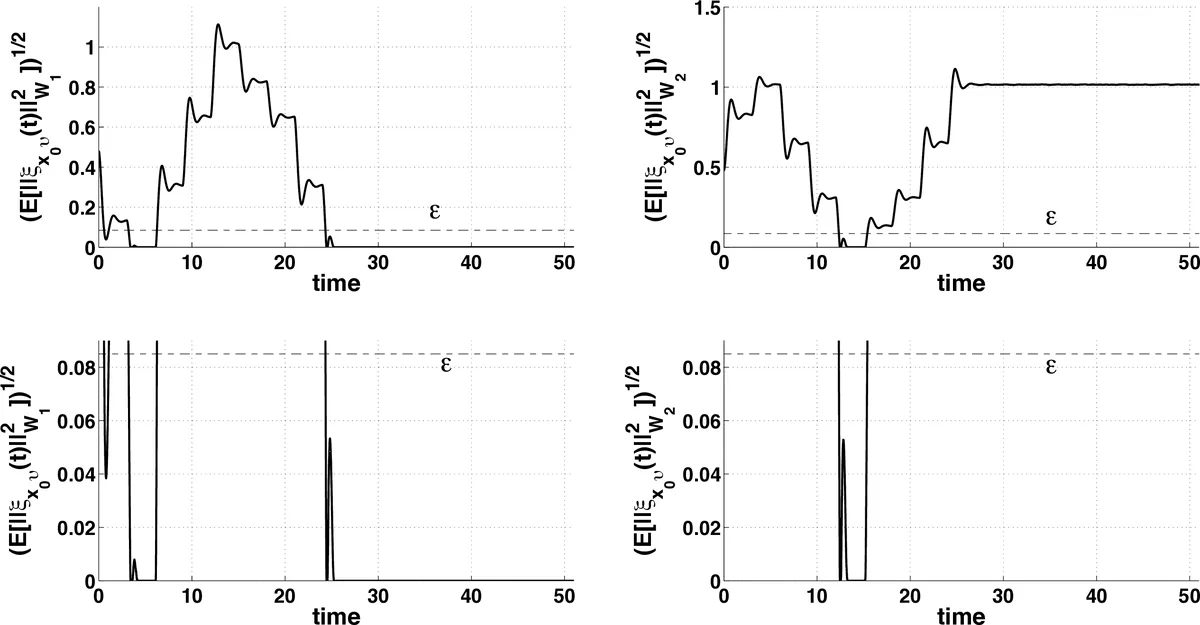
The paper extends symbolic control synthesis—originally developed for deterministic systems—to continuous‑time stochastic control systems modeled by stochastic differential equations (SDEs). The authors first introduce a probabilistic version of incremental input‑to‑state stability, denoted δ‑ISS‑M_q, which requires that the expected q‑th moment of the distance between two trajectories decays according to a KL‑function β and a K∞‑function γ, depending on the initial state difference and the supremum norm of the input difference. They then show that the existence of a δ‑ISS‑M_q Lyapunov function V(x,x′) with appropriate class‑K∞ bounds (α, α̅) and a negative drift condition (−κV + ρ(‖u−u′‖)) guarantees δ‑ISS‑M_q via Itô’s lemma and Grönwall’s inequality.
Using this stability property, the authors construct a finite‑state symbolic abstraction. The continuous state space ℝⁿ and input set U⊂ℝᵐ are uniformly quantized with resolutions η and μ, respectively, and a sampling period τ is fixed. The resulting transition system T_ε = (Q, Λ, →, Y) has a finite set of abstract states Q =
Comments & Academic Discussion
Loading comments...
Leave a Comment