IK-PSO, PSO Inverse Kinematics Solver with Application to Biped Gait Generation
This paper describes a new approach allowing the generation of a simplified Biped gait. This approach combines a classical dynamic modeling with an inverse kinematics’ solver based on particle swarm optimization, PSO. First, an inverted pendulum, IP, is used to obtain a simplified dynamic model of the robot and to compute the target position of a key point in biped locomotion, the Centre Of Mass, COM. The proposed algorithm, called IK-PSO, Inverse Kinematics PSO, returns and inverse kinematics solution corresponding to that COM respecting the joints constraints. In This paper the inertia weight PSO variant is used to generate a possible solution according to the stability based fitness function and a set of joints motions constraints. The method is applied with success to a leg motion generation. Since based on a pre-calculated COM, that satisfied the biped stability, the proposal allowed also to plan a walk with application on a small size biped robot.
💡 Research Summary
The paper introduces a novel method for generating simplified biped gait by integrating a classical dynamic model with an inverse‑kinematics (IK) solver based on Particle Swarm Optimization (PSO). The authors first employ an inverted pendulum (IP) model to capture the global dynamics of a biped robot in a highly reduced form. By treating the robot as a point mass suspended from a pivot on the ground, the IP model yields a tractable relationship between the robot’s Center of Mass (COM) trajectory and the joint angles of the legs. The COM trajectory is pre‑computed offline and serves as the primary stability reference: if the COM remains within the support polygon, the robot will not tip over.
Having defined a target COM path, the second stage solves the inverse kinematics problem: find a set of joint angles that place the robot’s COM at the desired location while respecting joint limits, torque constraints, and collision avoidance. To this end, the authors propose IK‑PSO (Inverse Kinematics PSO). In IK‑PSO each particle encodes a full vector of joint angles (the dimensionality equals the number of actuated joints). The swarm evolves according to the inertia‑weight variant of PSO, where the inertia weight is linearly decreased from a high initial value (promoting exploration) to a low final value (promoting exploitation).
The fitness function is a weighted sum of two components. The first component measures the Euclidean distance between the COM generated by a particle’s joint configuration (computed through the IP forward model) and the pre‑computed target COM point for the current time step. Minimizing this term directly enforces the global stability requirement. The second component penalizes violations of joint limits, maximum velocity, and torque bounds, as well as any configuration that would cause self‑collision or foot‑ground penetration. By embedding these constraints into the fitness, the optimizer naturally discards infeasible solutions without the need for separate projection or repair steps.
The algorithm proceeds as follows: (1) discretize the desired COM trajectory into a sequence of waypoints; (2) for each waypoint, run IK‑PSO to obtain a feasible joint configuration that reproduces the waypoint’s COM; (3) concatenate the resulting joint configurations over time to form a continuous leg trajectory. The authors conduct a systematic parameter study, varying swarm size, maximum iteration count, and inertia‑weight schedule. Results show that a moderate swarm (30–40 particles) with 100–150 iterations per waypoint yields a good trade‑off between solution quality and computational cost. The linear inertia‑weight decay proves especially effective: early iterations explore the high‑dimensional joint space, while later iterations converge rapidly to a high‑quality solution.
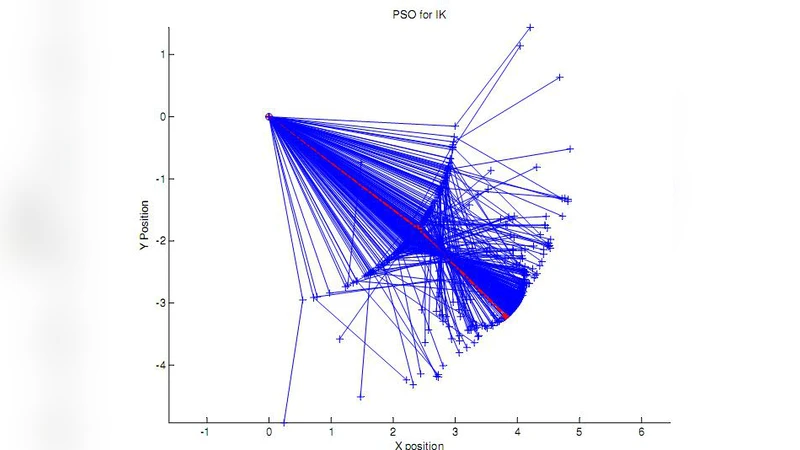
Experimental validation is performed on a small‑scale biped prototype equipped with a 2‑DOF leg (hip and knee). The target COM path is generated to satisfy the Zero‑Moment‑Point (ZMP) stability criterion. IK‑PSO successfully produces joint angle profiles that cause the foot to contact the ground precisely when the COM passes over the support foot, confirming that the robot remains statically stable throughout the step. Compared with a conventional Jacobian‑based IK method, IK‑PSO demonstrates superior handling of joint limits and produces smoother, more physically plausible motions. Moreover, by chaining multiple steps, the authors illustrate the ability to plan an entire walking cycle, not just a single step, while preserving stability at each intermediate stance.
Key contributions of the work are: (i) a COM‑centric stability formulation that decouples global dynamic planning from local joint‑level IK; (ii) a PSO‑based IK solver that integrates joint constraints directly into the optimization objective, thereby avoiding the numerical instability and singularity issues typical of gradient‑based IK; (iii) a thorough empirical analysis of PSO parameters specific to biped gait generation. The paper also outlines future directions, including extension to full‑body multi‑DOF models, incorporation of nonlinear torque limits, real‑time implementation via GPU‑accelerated PSO, and adaptive inertia‑weight strategies that react to the difficulty of the current waypoint. Overall, the proposed IK‑PSO framework offers a robust, flexible alternative for generating stable, constraint‑aware gait trajectories in legged robots.