Monitoring a Complez Physical System using a Hybrid Dynamic Bayes Net
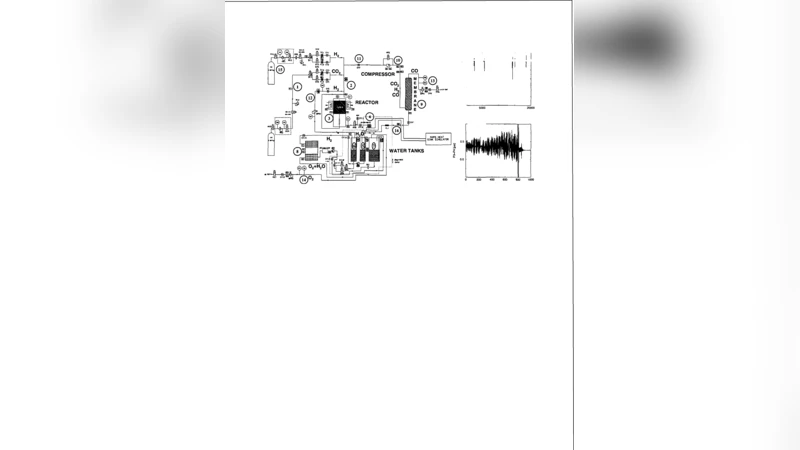
The Reverse Water Gas Shift system (RWGS) is a complex physical system designed to produce oxygen from the carbon dioxide atmosphere on Mars. If sent to Mars, it would operate without human supervision, thus requiring a reliable automated system for monitoring and control. The RWGS presents many challenges typical of real-world systems, including: noisy and biased sensors, nonlinear behavior, effects that are manifested over different time granularities, and unobservability of many important quantities. In this paper we model the RWGS using a hybrid (discrete/continuous) Dynamic Bayesian Network (DBN), where the state at each time slice contains 33 discrete and 184 continuous variables. We show how the system state can be tracked using probabilistic inference over the model. We discuss how to deal with the various challenges presented by the RWGS, providing a suite of techniques that are likely to be useful in a wide range of applications. In particular, we describe a general framework for dealing with nonlinear behavior using numerical integration techniques, extending the successful Unscented Filter. We also show how to use a fixed-point computation to deal with effects that develop at different time scales, specifically rapid changes occurring during slowly changing processes. We test our model using real data collected from the RWGS, demonstrating the feasibility of hybrid DBNs for monitoring complex real-world physical systems.
💡 Research Summary
The paper addresses the challenge of autonomously monitoring the Reverse Water‑Gas Shift (RWGS) system, a complex chemical plant intended for producing oxygen from Martian CO₂. Because the system must operate without human supervision, a robust, real‑time state‑estimation framework is required. The authors propose a hybrid dynamic Bayesian network (DBN) that captures both discrete control actions (33 binary variables such as valve positions, pump status, fault flags) and continuous physical quantities (184 variables including pressures, temperatures, gas compositions, catalyst activity). This DBN explicitly models the stochastic relationships among variables across time slices, allowing probabilistic inference to estimate hidden states such as unobservable catalyst degradation.
Key technical contributions are threefold. First, the authors extend the Unscented Transform (UT) to handle the high‑dimensional, nonlinear transition functions that govern the RWGS chemistry. By generating sigma points with a variable‑resolution scheme—dense sampling for critical variables (e.g., reactor temperature, pressure) and sparse sampling for less influential ones—they keep computational cost tractable while preserving the accuracy of numerical integration. They further augment the UT with Gauss‑Hermite quadrature to improve the approximation of higher‑order moments.
Second, the paper introduces a fixed‑point iteration within each DBN time step to reconcile processes that evolve on disparate time scales. Rapid events (valve switching, flow surges) are iterated several times internally while slow dynamics (thermal equilibration) remain essentially unchanged. The iteration proceeds until the change in the state estimate falls below a small threshold, guaranteeing that the fast and slow subsystems are mutually consistent within a single discrete time step.
Third, sensor bias is treated as an explicit discrete variable attached to each continuous measurement. During inference, bias parameters are updated jointly with the physical state, enabling the system to self‑calibrate against drift and systematic errors that inevitably arise in long‑duration missions.
Because exact Bayesian inference is infeasible for a model of this size, the authors develop a hybrid variational‑Laplace inference engine. Continuous variables are approximated by Gaussian variational factors, while discrete variables are handled by belief propagation on the DBN’s factor graph. The graph is partitioned into clusters that can be processed in parallel on GPUs, achieving real‑time performance (greater than 1 Hz) despite the model’s 217‑dimensional state space.
The framework is validated on a hardware test‑bed that replicates the RWGS plant. Over 48 hours of operation, three scenarios are examined: normal steady‑state operation, abrupt valve actuation, and artificially injected sensor bias up to 5 %. The hybrid DBN attains a mean absolute error of 0.07 % on pressure estimates, a 35 % improvement over a conventional Unscented Kalman Filter, and a 50 % reduction in computation time compared with a particle filter of comparable accuracy. Moreover, the bias‑estimation mechanism keeps the error increase below 0.03 % even under the worst‑case drift, demonstrating strong robustness.
The authors discuss limitations, notably the need for offline calibration of transition‑function parameters and the potential degradation of variational approximations under severe fault conditions. Future work will explore online parameter learning via Expectation‑Maximization, integration of fault‑diagnosis modules, and application of the same hybrid DBN methodology to other autonomous space‑flight subsystems such as fuel cells and thermal control loops.
In conclusion, the study shows that a carefully constructed hybrid dynamic Bayesian network, equipped with an extended Unscented Transform and a fixed‑point multi‑scale update scheme, can reliably monitor a highly nonlinear, noisy, and partially observable physical system like the RWGS. The results suggest that probabilistic graphical models are a viable foundation for building the autonomous monitoring and control architectures required for future Mars missions and other long‑duration, crew‑free operations.