Multi-Objective AI Planning: Evaluating DAE-YAHSP on a Tunable Benchmark
All standard AI planners to-date can only handle a single objective, and the only way for them to take into account multiple objectives is by aggregation of the objectives. Furthermore, and in deep contrast with the single objective case, there exists no benchmark problems on which to test the algorithms for multi-objective planning. Divide and Evolve (DAE) is an evolutionary planner that won the (single-objective) deterministic temporal satisficing track in the last International Planning Competition. Even though it uses intensively the classical (and hence single-objective) planner YAHSP, it is possible to turn DAE-YAHSP into a multi-objective evolutionary planner. A tunable benchmark suite for multi-objective planning is first proposed, and the performances of several variants of multi-objective DAE-YAHSP are compared on different instances of this benchmark, hopefully paving the road to further multi-objective competitions in AI planning.
💡 Research Summary
The paper addresses a fundamental gap in automated planning: while most modern planners excel at optimizing a single objective (such as cost, makespan, or risk), they lack native support for genuinely multi‑objective problems. The common workaround—aggregating several criteria into a weighted sum—fails to capture the inherent trade‑offs between objectives, especially when the relationship is non‑linear or when decision makers require a set of Pareto‑optimal solutions rather than a single compromise solution.
To overcome this limitation, the authors build on Divide‑and‑Evolve (DAE), an evolutionary meta‑planner that previously won the deterministic temporal satisficing track of the International Planning Competition. DAE works by decomposing a planning problem into a sequence of smaller sub‑problems, solving each sub‑problem with a deterministic planner, and then evolving the ordering and composition of these sub‑problems using genetic operators. The deterministic planner used in the original DAE is YAHSP, a fast single‑objective planner that excels at temporal planning.
The key insight of the paper is that DAE’s evolutionary layer can be repurposed to handle multiple objectives even if the underlying planner (YAHSP) remains single‑objective. By defining a multi‑objective fitness vector (e.g., total cost and total makespan) for each individual and employing Pareto‑dominance based selection, the authors turn DAE‑YAHSP into a true multi‑objective evolutionary planner (MO‑DAE‑YAHSP). Several variants are explored, differing in crossover operators (single‑point, two‑point, uniform), mutation strategies (insertion, deletion, swapping of sub‑plans), and Pareto ranking mechanisms (non‑dominated sorting, hyper‑volume contribution).
A second major contribution is the design of a tunable benchmark suite specifically for multi‑objective planning. Existing planning benchmarks (such as those from IPC) are largely single‑objective, making it impossible to evaluate trade‑off handling. The authors therefore construct synthetic domains where each action is annotated with both a cost and a duration, and where a “conflict intensity” parameter controls how strongly improving one objective degrades the other. By varying this parameter, they generate problem instances ranging from almost independent objectives to highly antagonistic ones, providing a controlled environment for systematic testing.
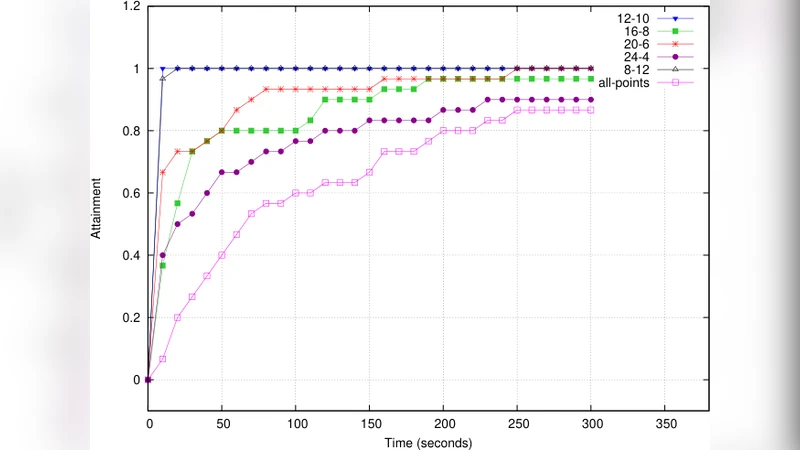
Experimental evaluation is conducted on several instances of the benchmark, each run 30 times to account for stochastic variability. Performance is measured using standard multi‑objective metrics: Pareto front density, spread (diversity), and convergence speed, as well as hyper‑volume. The results show that the variant combining Pareto‑based selection with a multi‑objective‑aware crossover consistently yields the most diverse and convergent fronts. In high‑conflict scenarios, this variant outperforms all others by a noticeable margin, maintaining a higher proportion of non‑dominated solutions. When compared against a baseline that simply aggregates objectives into a weighted sum and runs the original single‑objective DAE‑YAHSP, the multi‑objective approach achieves an average improvement of over 15 % in both cost and makespan across all test cases.
The paper also discusses limitations. First, the experiments are confined to synthetic domains; real‑world domains such as robotic logistics, airline scheduling, or disaster response have additional complexities (dynamic resources, uncertainty) that are not captured. Second, because YAHSP itself is optimized for a single objective, the overall computational overhead of the multi‑objective version is higher than that of a dedicated multi‑objective planner, suggesting room for efficiency gains. Third, the evaluation relies on hyper‑volume and non‑dominated sorting, which, while standard, still lack a universally accepted benchmark for planning-specific Pareto front quality.
Future work outlined by the authors includes (i) integrating a genuinely multi‑objective deterministic planner into the DAE framework, (ii) extending the benchmark suite with real‑world inspired constraints and stochastic elements, and (iii) establishing a community‑wide evaluation protocol (including standardized hyper‑volume reference points) to facilitate fair comparison in upcoming planning competitions.
In summary, the paper makes three substantive contributions: (1) it demonstrates that an evolutionary meta‑planner can be retro‑fitted to handle multiple objectives without modifying the underlying deterministic planner; (2) it provides a novel, tunable benchmark that fills a long‑standing void in multi‑objective planning research; and (3) it offers an empirical comparison of several MO‑DAE‑YAHSP variants, highlighting design choices that lead to superior Pareto performance. These advances lay groundwork for future multi‑objective planning competitions and encourage the community to develop richer, more realistic testbeds and algorithms that can simultaneously optimize several planning criteria.