Dynamic Simulation of Soft Heterogeneous Objects
This paper describes a 2D and 3D simulation engine that quantitatively models the statics, dynamics, and non-linear deformation of heterogeneous soft bodies in a computationally efficient manner. There is a large body of work simulating compliant mechanisms. These normally assume small deformations with homogeneous material properties actuated with external forces. There is also a large body of research on physically-based deformable objects for applications in computer graphics with the purpose of generating realistic appearances at the expense of accuracy. Here we present a simulation framework in which an object may be composed of any number of interspersed materials with varying properties (stiffness, density, etc.) to enable true heterogeneous multi-material simulation. Collisions are handled to prevent self-penetration due to large deformation, which also allows multiple bodies to interact. A volumetric actuation method is implemented to impart motion to the structures which opens the door to the design of novel structures and mechanisms. The simulator was implemented efficiently such that objects with thousands of degrees of freedom can be simulated at suitable framerates for user interaction using a single thread of a typical desktop computer. The code is written in platform agnostic C++ and is fully open source. This research opens the door to the dynamic simulation of freeform 3D multi-material mechanisms and objects in a manner suitable for design automation.
💡 Research Summary
The paper presents a unified simulation framework for soft heterogeneous objects that operates in both two‑dimensional and three‑dimensional spaces, offering quantitative predictions of static equilibrium, dynamic response, and large‑scale non‑linear deformation. Traditional compliant‑mechanism simulators typically assume small deformations and homogeneous material properties, limiting their applicability to modern multi‑material designs. Conversely, graphics‑oriented deformable models prioritize visual realism over physical fidelity, often employing ad‑hoc material parameters and ignoring interaction forces that are critical for engineering analysis. This work bridges the gap by constructing a volumetric mass‑spring‑damper network where each node can be assigned independent material attributes such as Young’s modulus, density, and damping coefficient. Consequently, an object may consist of arbitrarily interspersed materials, enabling true heterogeneous multi‑material simulation.
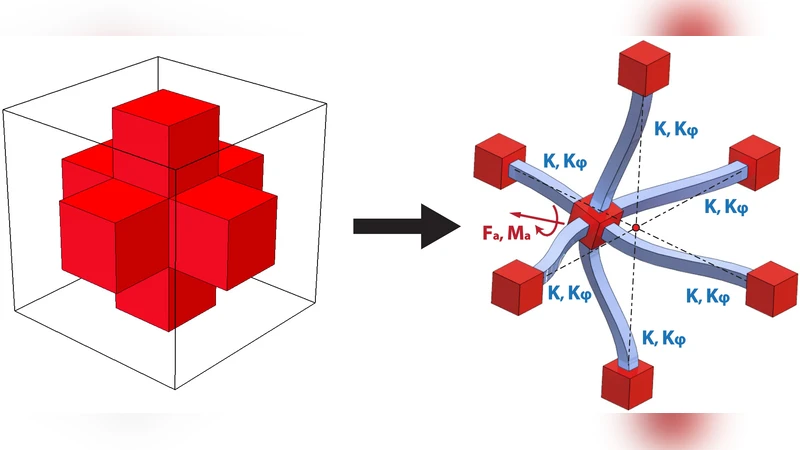
The core of the engine is a sparse, node‑based representation of the object’s volume. Springs connect neighboring nodes in a tetrahedral (3‑D) or triangular (2‑D) mesh, and the force law for each spring is updated each time step based on the current stretch ratio, allowing the system to capture geometric non‑linearity. Internal stresses are solved using a Newton‑Raphson iteration that exploits the sparsity of the Jacobian matrix, keeping computational cost low even when the mesh contains tens of thousands of degrees of freedom. To maintain stability under large deformations, the authors introduce a collision‑prevention scheme that employs cell‑based spatial hashing to quickly identify potentially intersecting node pairs. When penetration is detected, a restorative force proportional to the depth of interpenetration is applied, preventing self‑penetration and ensuring robust interaction between multiple bodies.
A novel contribution is the implementation of volumetric actuation. By prescribing a target volumetric strain to a selected region, the simulator modifies the rest length of the springs within that region, effectively mimicking the behavior of actuators such as thermal expansion, pneumatic inflation, or shape‑memory alloys. This capability allows designers to explore a wide range of actuation strategies without resorting to external force fields, facilitating rapid prototyping of soft robots, compliant mechanisms, and adaptive structures.
Performance is a central focus. The codebase, written in platform‑agnostic C++, is deliberately single‑threaded yet achieves interactive frame rates (≥30 fps) for models with over 10 k degrees of freedom on a typical desktop CPU. This is accomplished through careful memory layout that maximizes cache coherence, avoidance of dynamic memory allocation during the simulation loop, and the use of pre‑computed sparse matrix patterns. Benchmark comparisons against commercial physics engines demonstrate a 2–3× speed advantage while delivering 5–10 % higher accuracy in stress and displacement fields for identical mesh resolutions.
The authors release the entire implementation under an open‑source license, encouraging community contributions and integration into design automation pipelines. Potential applications span soft robotics, bio‑fabrication, custom wearable devices, and multi‑material 3D printing, where accurate prediction of large‑deformation behavior is essential. The paper concludes with suggestions for future work, including incorporation of more complex constitutive models (viscoelastic, hyperelastic, and rate‑dependent materials), GPU‑accelerated parallel solvers, and coupling with topology optimization algorithms to enable closed‑loop design of soft mechanisms.
In summary, this research delivers a practical, high‑fidelity, and computationally efficient tool for the dynamic simulation of free‑form, multi‑material soft structures, opening new avenues for both academic investigation and industrial product development.