The Dynamic Controllability of Conditional STNs with Uncertainty
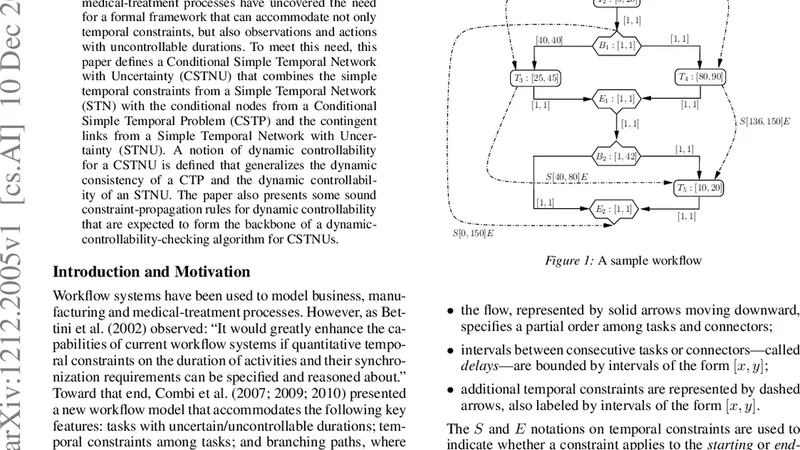
Recent attempts to automate business processes and medical-treatment processes have uncovered the need for a formal framework that can accommodate not only temporal constraints, but also observations and actions with uncontrollable durations. To meet this need, this paper defines a Conditional Simple Temporal Network with Uncertainty (CSTNU) that combines the simple temporal constraints from a Simple Temporal Network (STN) with the conditional nodes from a Conditional Simple Temporal Problem (CSTP) and the contingent links from a Simple Temporal Network with Uncertainty (STNU). A notion of dynamic controllability for a CSTNU is defined that generalizes the dynamic consistency of a CTP and the dynamic controllability of an STNU. The paper also presents some sound constraint-propagation rules for dynamic controllability that are expected to form the backbone of a dynamic-controllability-checking algorithm for CSTNUs.
💡 Research Summary
The paper addresses a pressing need in automated business‑process management and medical‑treatment planning: a formal model that can simultaneously handle temporal constraints, conditional observations, and actions whose durations are not under the planner’s control. To meet this need, the authors introduce the Conditional Simple Temporal Network with Uncertainty (CSTNU), a unified framework that merges three well‑studied formalisms. From Simple Temporal Networks (STNs) it inherits linear constraints between time points; from Conditional Simple Temporal Problems (CSTPs) it adopts conditional nodes and observation variables that become active only after certain events are observed; from Simple Temporal Networks with Uncertainty (STNUs) it incorporates contingent links whose end times are determined by the environment rather than the scheduler. By integrating these ingredients, a CSTNU can faithfully represent “observe → decide → execute” workflows where both the logical branching (based on observations) and the temporal uncertainty (contingent durations) coexist.
The central theoretical contribution is a definition of Dynamic Controllability (DC) for CSTNUs. This notion generalizes two earlier concepts: dynamic consistency of CSTPs (which guarantees that a strategy can be chosen on‑line once observations are known) and dynamic controllability of STNUs (which guarantees that a strategy can adapt to the actual durations of contingent links as they unfold). The CSTNU‑DC definition requires that, at any execution point, the planner may base decisions solely on observations that have already occurred and on the actual elapsed times of any contingent links that have completed, while still guaranteeing that a feasible schedule exists for every possible future combination of observations and contingent durations. In other words, a CSTNU is dynamically controllable if there exists a policy that reacts in real time to both logical and temporal uncertainty without requiring foresight.
To make this abstract definition operational, the authors propose a set of sound constraint‑propagation rules. These rules extend the label‑propagation technique used in CSTPs and the lower/upper‑bound propagation used in STNUs. Each conditional observation yields a label representing a particular truth assignment to the observation variables. For every label the algorithm computes a feasible interval (lower and upper bound) for each time point, taking into account both the deterministic STN constraints and the uncertain contingent links. When a label leads to contradictory bounds, it is pruned, dramatically reducing the search space. The propagation also respects the “wait‑and‑see” nature of contingent links: the algorithm postpones decisions that depend on a contingent duration until that duration is actually observed, then updates the intervals accordingly. The authors prove that these rules are both sound (they never discard a dynamically controllable CSTNU) and complete with respect to the sufficient conditions they encode, thereby forming the backbone of a potential polynomial‑time DC‑checking algorithm.
The paper includes a formal model definition, proofs of the equivalence between the CSTNU‑DC definition and the existence of a viable dynamic strategy, and a demonstration of the propagation rules on a small illustrative network. The examples show how the combined framework can capture scenarios that are inexpressible in either pure CSTPs or pure STNUs, highlighting the expressive power of CSTNUs.
In the discussion, the authors acknowledge that while the propagation rules provide a solid foundation, a full-fledged algorithm with guaranteed polynomial‑time complexity and comprehensive empirical validation remains future work. They outline a research agenda that includes (1) implementing the propagation engine, (2) integrating optimization techniques for label management, (3) testing the approach on real‑world case studies from healthcare scheduling and manufacturing, and (4) exploring extensions such as probabilistic contingencies or resource constraints. Overall, the paper makes a significant theoretical advance by unifying conditional reasoning and temporal uncertainty under a single dynamic‑controllability framework, and it sets the stage for practical algorithms that could bring robust, real‑time planning to complex, observation‑driven domains.