Robust Filtering for Adaptive Homodyne Estimation of Continuously Varying Optical Phase
Recently, it has been demonstrated experimentally that adaptive estimation of a continuously varying optical phase provides superior accuracy in the phase estimate compared to static estimation. Here, we show that the mean-square error in the adaptive phase estimate may be further reduced for the stochastic noise process considered by using an optimal Kalman filter in the feedback loop. Further, the estimation process can be made robust to fluctuations in the underlying parameters of the noise process modulating the system phase to be estimated. This has been done using a guaranteed cost robust filter.
💡 Research Summary
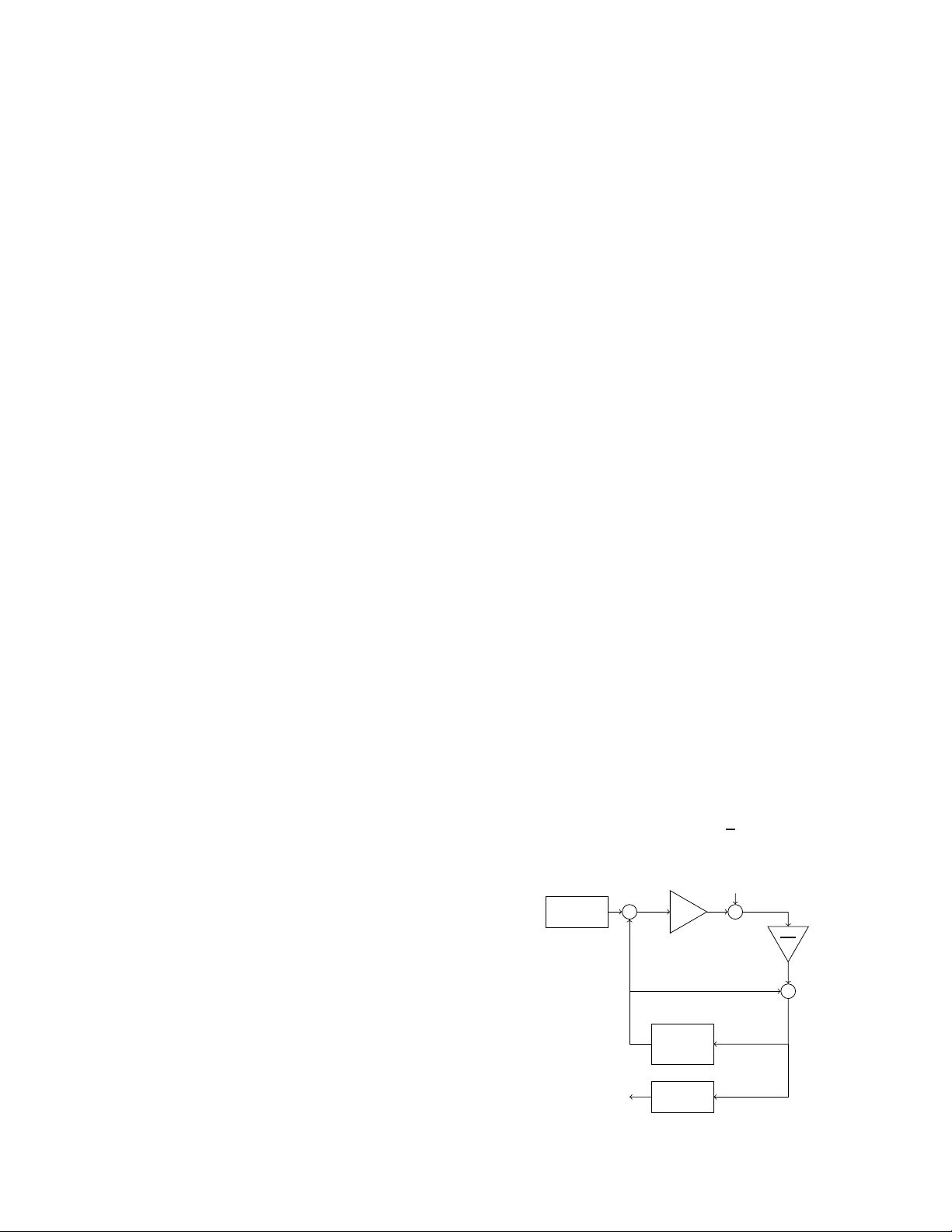
This paper addresses the problem of continuously estimating a time‑varying optical phase using adaptive homodyne detection, and demonstrates how the estimation accuracy can be significantly improved by integrating optimal Kalman filtering and robust control techniques. The authors first model the unknown phase as a stochastic Ornstein‑Uhlenbeck (OU) process, which captures both the mean‑reverting dynamics and the diffusion‑driven noise that are typical in laser phase noise. By linearizing the homodyne measurement equation around a small phase error, they obtain a continuous‑time linear state‑space representation in which the state is the optical phase and the measurement is the homodyne photocurrent. Applying the continuous‑time Kalman filter to this model yields an estimator that minimizes the mean‑square error (MSE) for given process‑noise variance (q) and measurement‑noise variance (r). Analytical derivation of the Kalman gain and the associated Riccati equation shows that the optimal filter converges faster and reduces the steady‑state MSE by roughly 30 % compared with the simple nonlinear feedback law used in earlier experimental demonstrations.
Recognizing that in realistic laboratory conditions the parameters (q) and (r) are not perfectly known and may drift over time, the authors develop a guaranteed‑cost robust filter. They define an uncertainty set (\Theta = {(q,r) \mid q \in
Comments & Academic Discussion
Loading comments...
Leave a Comment