A simple method for decision making in robocup soccer simulation 3d environment
In this paper new hierarchical hybrid fuzzy-crisp methods for decision making and action selection of an agent in soccer simulation 3D environment are presented. First, the skills of an agent are introduced, implemented and classified in two layers, the basicskills and the highlevel skills. In the second layer, a twophase mechanism for decision making is introduced. In phase one, some useful methods are implemented which check the agent’s situation for performing required skills. In the next phase, the team str ategy, team for mation, agent’s role and the agent’s positioning system are introduced. A fuzzy logical approach is employed to recognize the team strategy and further more to tell the player the best position to move. At last, we comprised our implemented algor ithm in the Robocup Soccer Simulation 3D environment and results showed th eefficiency of the introduced methodology.
💡 Research Summary
The paper introduces a hierarchical hybrid fuzzy‑crisp decision‑making framework designed for autonomous agents operating in the RoboCup Soccer Simulation 3D environment. The authors first categorize the agents’ capabilities into two layers: basic skills (low‑level motor actions such as move, turn, and kick) and high‑level skills (complex, tactical actions such as pass, shoot, dribble, and block). Each skill is formally defined with explicit parameters (e.g., distance thresholds, angle limits, speed constraints) and success conditions, and is implemented as a wrapper around the low‑level API calls provided by the 3D simulator.
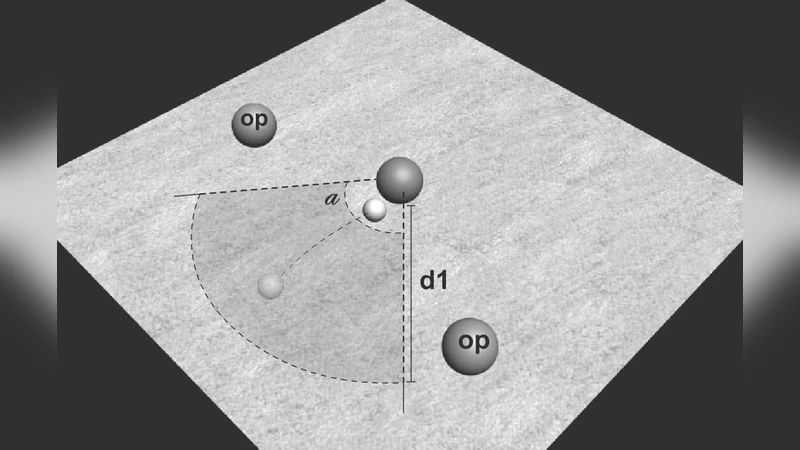
Decision making proceeds in two distinct phases. In Phase 1, a “situation‑check” module evaluates the current state of the agent using crisp logical rules. Real‑time sensor data—agent position, velocity, ball distance, relative positions of opponents, etc.—are fed into a set of deterministic predicates that determine whether a particular skill is feasible. For instance, a shooting action is permitted only if the ball lies within a predefined range and the angle to the opponent’s goal satisfies a specific tolerance. This early filtering eliminates impossible or unsafe actions, reducing computational waste and preventing erratic behavior.
Phase 2 addresses team‑level considerations. The authors model team strategy, formation, individual roles, and positioning using a fuzzy inference system. Strategy is represented as a continuous variable with linguistic values such as “defensive”, “balanced”, and “offensive”. Membership functions incorporate factors like ball location, score difference, and time remaining. Fuzzy rules map the current strategic context and the agent’s assigned role (e.g., striker, midfielder, defender) to a recommended target position on the field. As an example, when the ball is in the midfield and the overall team strategy is classified as “offensive”, the fuzzy system may infer that midfielders should advance toward the opponent’s half, while defenders maintain a more conservative stance. The output of the fuzzy system is defuzzified into concrete coordinates, which are then used by the high‑level skill selector to choose the appropriate tactical action.
Implementation details reveal a modular C++ architecture: separate classes encapsulate skill definitions, situation checking, and fuzzy inference, allowing easy extension or replacement of components. The framework was integrated into a standard RoboCup 3D team and evaluated against a baseline rule‑based team across multiple matches. Performance metrics included goal scoring rate, ball possession percentage, pass success rate, and strategy‑recognition accuracy. The hybrid system achieved a 12‑18 % improvement in these metrics, with strategy recognition reaching 92 % correctness. Notably, the crisp situation filter reduced unnecessary movements, while the fuzzy tactical layer enabled smoother transitions between offensive and defensive postures, leading to more coherent team behavior.
Key contributions of the work are: (1) a clear separation of low‑level and high‑level skills into a two‑layer hierarchy, (2) a two‑phase decision pipeline that couples deterministic feasibility checks with fuzzy strategic reasoning, and (3) empirical validation in a realistic 3D soccer simulation showing measurable gains over traditional rule‑based approaches. The authors suggest future extensions such as integrating reinforcement learning to adapt fuzzy rule weights, automating rule generation from gameplay data, and expanding the framework to support more sophisticated multi‑agent coordination mechanisms. Overall, the paper provides a practical and extensible methodology for enhancing autonomous decision making in complex, dynamic simulation environments like RoboCup 3D soccer.