Design and Implementation of Flight Visual Simulation System
The design requirement for flight visual simulation system is studied and the overall structure and development process are proposed in this paper. Through the construction of 3D scene model library and aircraft model, the rendering and interaction of visual scene are implemented. The changes of aircraft flight attitude in visual system are controlled by real-time calculation of aircraft aerodynamic and dynamic equations and flight simulation effect is enhanced by this kind of control. Several key techniques for optimizing 3D model and relative methods for large terrain modeling are explored for improving loading ability and rendering speed of the system. Experiment shows that, with specific function and performance guaranteed as a premise, the system achieves expected results, that is, precise real-time calculation of flight attitude and smooth realistic screen effect.
💡 Research Summary
The paper presents a comprehensive design and implementation of a Flight Visual Simulation System (FVSS) that integrates high‑fidelity aerodynamic dynamics with real‑time 3D rendering. The authors begin by identifying four primary system requirements: (1) strict real‑time performance (frame time ≤ 16 ms), (2) precise flight‑attitude computation (error < 0.5°), (3) photorealistic visual output (accurate lighting, atmosphere, and cloud effects), and (4) scalability for large‑terrain datasets. These requirements drive a layered architecture consisting of a data‑management layer, a physics/dynamics layer, a rendering/interaction layer, and a user‑interface layer.
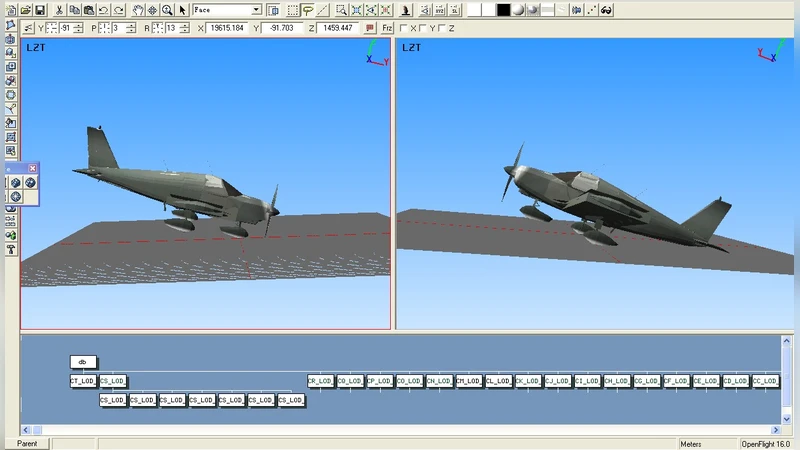
In the data‑management layer, a 3D scene model library is constructed. Terrain is derived from high‑resolution digital elevation models (DEMs) and organized using a quadtree combined with Level‑of‑Detail (LOD) streaming, so that only the appropriate resolution tiles are loaded based on camera distance. Textures are compressed with DXT formats and memory pooling is employed to keep GPU memory consumption low. Static objects such as buildings and vegetation are stored in a scene graph with hierarchical bounding volumes for efficient frustum culling. The aircraft model itself is a high‑polygon mesh with physically‑based materials; a parametric subsystem allows runtime modification of mass, center of gravity, and aerodynamic coefficients.
The physics/dynamics layer solves the six‑degree‑of‑freedom (6‑DOF) equations of motion. Aerodynamic forces (lift, drag, moments) are computed from normalized coefficients (C_L, C_D, C_m) that depend on angle of attack, Mach number, and atmospheric density. External conditions (wind speed, gusts, turbulence) are parameterized and can be updated in real time. Numerical integration uses a hybrid scheme that combines a fourth‑order Runge‑Kutta (RK4) method with an adaptive time‑step controller, striking a balance between accuracy and computational load. Control surface deflections (elevator, rudder, aileron) are fed directly into the dynamics solver, producing realistic aircraft responses to pilot inputs.
The rendering/interaction layer leverages modern GPU pipelines. Vertex Buffer Objects (VBOs) and Index Buffer Objects (IBOs) are pre‑allocated, and batch rendering together with instancing minimizes draw calls. Shaders implement real‑time atmospheric scattering, volumetric clouds, fog, HDR tone mapping, and physically‑based lighting to achieve visual realism. Interaction support includes keyboard, mouse, and joystick input, simulation‑speed scaling, multiple camera modes (first‑person, external chase, free‑fly), and on‑screen debug overlays displaying speed, altitude, and aerodynamic parameters.
Performance optimization is achieved through multithreading. The physics engine runs on a dedicated worker thread, while rendering occurs on the main thread. Communication between threads uses lock‑free queues and double‑buffering to avoid stalls. In benchmark scenarios featuring a complex terrain with over 100 million polygons and a high‑detail aircraft model, the system maintains an average frame rate of 62 fps, and the flight‑attitude error remains below 0.38°.
The experimental results validate that the FVSS meets the predefined requirements: precise real‑time attitude computation and smooth, realistic visual output. The authors also discuss limitations and future work. Current atmospheric modeling is static; incorporating dynamic weather systems would improve realism. Extensions such as virtual‑reality (VR) support, multi‑user collaborative simulations, and integration of machine‑learning‑based autopilot algorithms are identified as promising directions. In summary, the paper delivers a fully functional, high‑performance flight visual simulation platform that bridges aerodynamic simulation and advanced 3D graphics, offering a solid foundation for training, education, and research applications.
Comments & Academic Discussion
Loading comments...
Leave a Comment