Cellular Automata Based Model for Pedestrian Dynamics
We construct a two dimensional Cellular Automata based model for the description of pedestrian dynamics. Wide range of complicated pattern formation phenomena in pedestrian dynamics are described in the model, e.g. lane formation, jams in a counterflow and egress behavior. Mean-field solution of the densely populated case and numerical solution of the sparsely populated case are provided. This model has the potential to describe more flow phenomena.
💡 Research Summary
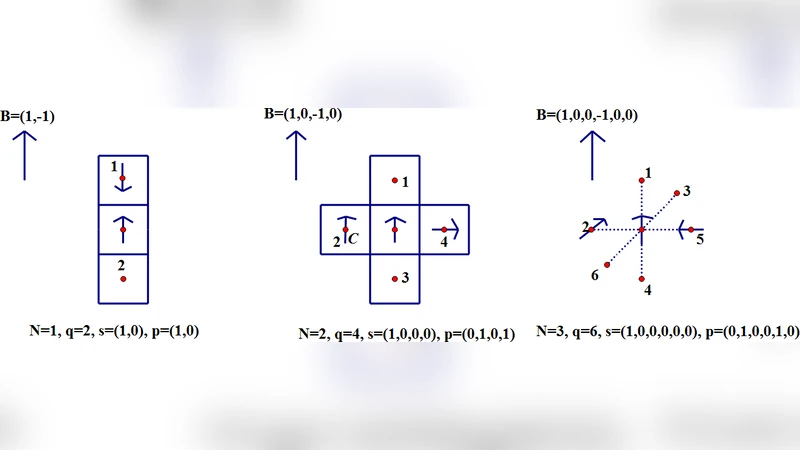
The paper presents a two‑dimensional cellular automaton (CA) framework for modeling pedestrian dynamics. The authors discretize space into a square lattice where each cell can be empty, occupied by a pedestrian, or contain an obstacle. Pedestrians move synchronously in discrete time steps. At each step a pedestrian evaluates the eight neighboring cells and selects the one that most reduces its Euclidean distance to a predefined target (e.g., an exit). The movement decision is modulated by an “activity parameter” α that depends on the local occupancy probability ρ; higher ρ reduces α and therefore lowers the probability of moving. When multiple pedestrians attempt to enter the same cell, a collision‑avoidance rule—either random selection or a predefined priority—allows only one pedestrian to move while the others wait. This set of simple, local rules generates non‑linear collective behavior.
Two analytical regimes are explored. In the densely populated limit the authors apply a mean‑field approximation. They define the average occupancy ρ and derive a continuum‑like evolution equation
∂ρ/∂t = D∇²ρ – λρ(1–ρ),
where D is an effective diffusion coefficient and λ represents the rate of “blocked” moves due to collisions. Stationary solutions reveal a phase transition: when ρ exceeds a critical value ρ_c, the system abruptly switches from a flowing state to a jammed state. Between these extremes, a stable solution corresponds to lane formation in counter‑flow situations. The mean‑field predictions are validated against numerical simulations, showing good agreement for moderate densities.
For sparse populations the mean‑field approach breaks down, so the authors perform explicit Monte‑Carlo simulations. Three benchmark scenarios are investigated: (1) bidirectional flow in a straight corridor, (2) high‑density inflow into a narrow passage, and (3) evacuation from a room with obstacles and a single exit. In scenario 1, random initial motion quickly self‑organizes into opposite‑direction lanes; lane width stabilizes and the overall flux increases as lane spacing decreases. In scenario 2, a sudden surge of pedestrians creates a high‑density region that evolves into a jam; the jam propagates backward as a density wave, and the average speed inside the jam drops to near zero. In scenario 3, pedestrians accumulate at the exit, producing a “burst” phenomenon: after a latency period a large group exits almost simultaneously, dramatically reducing the total evacuation time. These emergent patterns closely resemble empirical observations from laboratory experiments and real‑world crowd events.
Parameter sensitivity is examined by varying lattice spacing and time‑step size Δt. Finer lattices increase spatial resolution, leading to thinner lanes and a lower critical density for jam formation. Larger Δt effectively overestimates movement probability, suppressing jams and altering lane stability. The authors also discuss the impact of the activity parameter α and the collision‑avoidance rule on the quantitative outcomes.
The paper concludes with a discussion of extensions. Incorporating multiple destinations, heterogeneous walking speeds, and explicit social forces (e.g., leader‑follower dynamics, group cohesion) would enrich the model. Moreover, the authors propose calibrating α, D, and λ using real‑world trajectory data via machine‑learning techniques, thereby bridging the gap between the CA abstraction and measured pedestrian behavior. Such calibrated models could be deployed in urban planning, large‑event safety analysis, and emergency evacuation simulations, offering a computationally inexpensive yet qualitatively accurate tool for predicting crowd dynamics.
Comments & Academic Discussion
Loading comments...
Leave a Comment