Optimal Covering with Mobile Sensors in an Unbounded Region
Covering a bounded region with minimum number of homogeneous sensor nodes is a NP-complete problem \cite{Li09}. In this paper we have proposed an {\it id} based distributed algorithm for optimal coverage in an unbounded region. The proposed algorithm guarantees maximum spreading in $O(\sqrt{n})$ rounds without creating any coverage hole. The algorithm executes in synchronous rounds without exchanging any message. We have also explained how our proposed algorithm can achieve optimal energy consumption and handle random sensor node deployment for optimal spreading.
💡 Research Summary
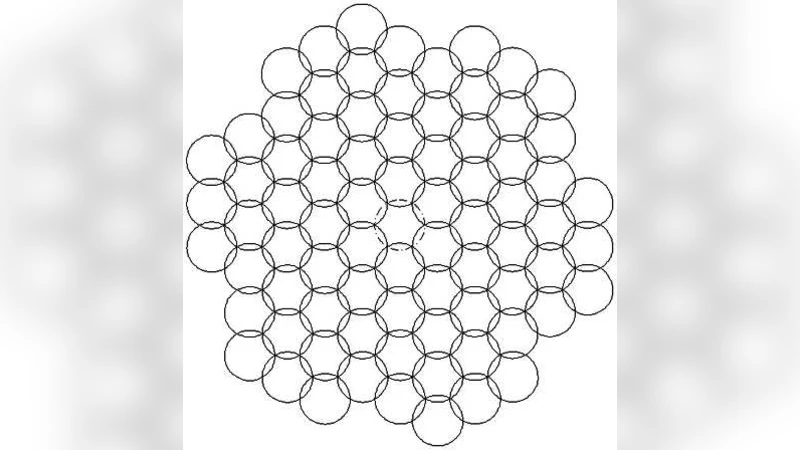
The paper addresses the problem of covering an unbounded planar region with a set of homogeneous mobile sensor nodes while minimizing the number of nodes required. Unlike most prior work that focuses on bounded regions and often relies on centralized computation or extensive message exchange, this study proposes a fully distributed, message‑free algorithm that operates solely on each node’s unique identifier (ID). The core insight is that a triangular (hexagonal) lattice provides the densest packing for equal‑radius circular sensing regions without overlap or gaps. By arranging sensors at the vertices of such a lattice, the entire plane can be covered optimally.
The algorithm proceeds in synchronous rounds. Each node is assigned a distinct integer ID, which is expressed in base‑3 (ternary). In round t, a node examines the t‑th digit of its ternary ID. Depending on whether this digit is 0, 1, or 2, the node selects one of six possible movement vectors that correspond to the six directions of a regular hexagon: stay on the current direction, rotate clockwise by 60°, or rotate counter‑clockwise by 60°. All nodes execute their chosen moves simultaneously, and after each round the node’s position aligns with a lattice vertex. Because the lattice expands outward layer by layer, the number of nodes added in layer k is exactly 6·k. Consequently, to accommodate n nodes the algorithm needs roughly √n layers, yielding a convergence time of O(√n) rounds. Importantly, at no point does a coverage hole appear; the distance between neighboring nodes is set to d = √3·r, where r is the sensing radius, guaranteeing that adjacent sensing circles just touch.
Energy efficiency is a central advantage. Each node moves only once to its final lattice position, minimizing locomotion energy. Since the protocol never transmits a packet, communication energy consumption is essentially zero. This makes the approach especially suitable for battery‑constrained wireless sensor networks deployed in remote or hazardous environments where recharging is impractical.
The authors also consider the realistic scenario where nodes are initially scattered randomly rather than placed on a lattice. Simulations show that the same ID‑based rule drives nodes toward lattice vertices regardless of their starting positions. To avoid collisions when multiple nodes would otherwise move to the same vertex, a simple conflict‑avoidance mechanism is incorporated: nodes with identical target directions defer movement based on a deterministic tie‑breaker derived from their IDs. The system converges reliably, and the final configuration is indistinguishable from the ideal hexagonal tiling.
Mathematical analysis underpins the design. The paper proves that when the inter‑node spacing d equals √3·r, the hexagonal tiling yields a coverage density of 100 % with zero overlap beyond the necessary touching points. The proof uses geometric relationships between the area of a regular hexagon and the area of a sensing circle, showing that the lattice’s fundamental cell exactly matches the area required for one sensor’s coverage. Additionally, an inductive argument demonstrates that after each round the set of occupied vertices expands outward by one layer, establishing the O(√n) bound on the number of rounds needed for n nodes.
In the discussion, the authors highlight several practical implications. The algorithm’s lack of communication eliminates the need for a control channel and reduces susceptibility to packet loss or interference. Its deterministic movement rule based on IDs simplifies implementation on low‑cost microcontrollers. Moreover, because the algorithm is inherently scalable, it can be applied to very large swarms without modification.
The conclusion reiterates that the proposed ID‑based, message‑free protocol achieves optimal, hole‑free coverage of an unbounded region in O(√n) rounds while minimizing both locomotion and communication energy. Future work is suggested in three directions: extending the method to environments with obstacles, adapting it to asynchronous execution where nodes may not share a global clock, and generalizing the approach to three‑dimensional spaces (e.g., aerial or underwater sensor swarms).