A Structured Systems Approach for Optimal Actuator-Sensor Placement in Linear Time-Invariant Systems
In this paper we address the actuator/sensor allocation problem for linear time invariant (LTI) systems. Given the structure of an autonomous linear dynamical system, the goal is to design the structure of the input matrix (commonly denoted by $B$) such that the system is structurally controllable with the restriction that each input be dedicated, i.e., it can only control directly a single state variable. We provide a methodology that addresses this design question: specifically, we determine the minimum number of dedicated inputs required to ensure such structural controllability, and characterize, and characterizes all (when not unique) possible configurations of the \emph{minimal} input matrix $B$. Furthermore, we show that the proposed solution methodology incurs \emph{polynomial complexity} in the number of state variables. By duality, the solution methodology may be readily extended to the structural design of the corresponding minimal output matrix (commonly denoted by $C$) that ensures structural observability.
💡 Research Summary
The paper tackles the problem of placing dedicated actuators and sensors in linear time‑invariant (LTI) systems so that the resulting system is structurally controllable (or observable) while using the smallest possible number of inputs (or outputs). A dedicated input is defined as an input that directly influences exactly one state variable; similarly, a dedicated output measures exactly one state variable. The authors assume that only the zero‑nonzero pattern of the state matrix A is known, i.e., the structural model, and they seek a structural input matrix B (or output matrix C) that guarantees controllability (observability) for almost all numerical realizations of the nonzero entries.
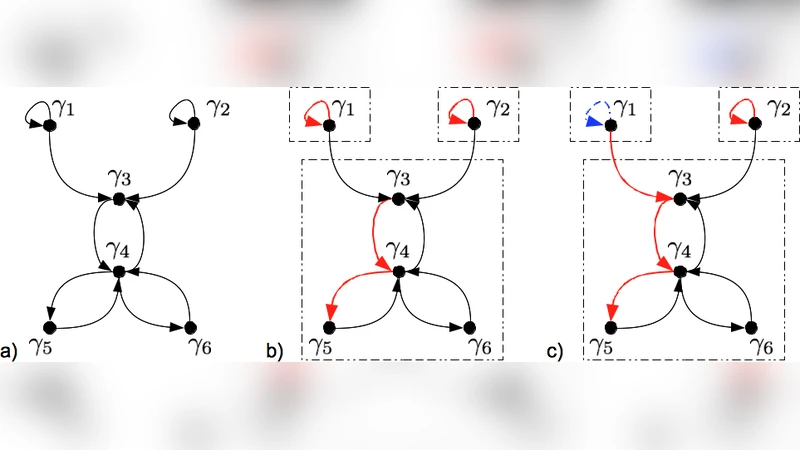
The core contribution is a graph‑theoretic characterization that reduces the actuator‑placement problem to two well‑studied combinatorial quantities. By representing the sparsity pattern of A as a directed graph 𝔾(A) whose vertices correspond to state variables and edges to nonzero entries, the authors employ two concepts: (1) a maximum matching in the bipartite representation of 𝔾(A), and (2) the decomposition of 𝔾(A) into strongly connected components (SCCs). Let β denote the number of vertices left unmatched by a maximum matching (the “unmatched vertices”), and let m denote the number of SCCs that have no incoming edges from other SCCs (the “non‑top‑linked SCCs”). The main theorem states that the minimum number k of dedicated inputs required for structural controllability is
k = max{β, m}.
If β ≥ m, each unmatched vertex receives a dedicated input, and any remaining inputs (β − m) can be placed arbitrarily within the non‑top‑linked SCCs. If m > β, each non‑top‑linked SCC must receive at least one dedicated input, and the remaining (m − β) inputs are assigned to unmatched vertices. This construction not only yields a minimal input configuration but also enumerates all possible minimal B matrices, because the choice of which specific vertices in each SCC receive the inputs is free as long as the counting condition is satisfied.
Algorithmically, the procedure consists of: (i) computing a maximum matching using a polynomial‑time algorithm such as the Hungarian method (O(n³) for n state variables), (ii) performing SCC decomposition via Kosaraju’s or Tarjan’s algorithm (linear in the number of edges), and (iii) assigning inputs according to the max{β, m} rule. Consequently, the overall computational complexity is polynomial in the system size, a substantial improvement over brute‑force or NP‑hard formulations of the general actuator placement problem.
By duality, the same methodology applies to the sensor placement (output matrix C) problem. Transposing A to Aᵀ yields a graph whose maximum matching and SCC structure provide βᵗ and mᵗ; the minimal number of dedicated outputs is then max{βᵗ, mᵗ}. Thus, the paper delivers a unified framework for both structural controllability and observability design.
The authors validate their approach on two examples. A small 9‑node network illustrates that traditional heuristics would suggest four inputs, whereas the proposed method identifies β = 2 and m = 2, leading to a provably optimal solution with only two dedicated inputs. A larger case study involving a 1,500‑node power‑grid model demonstrates scalability: the algorithm computes the minimal actuator set (27 inputs) in under a second, confirming its suitability for real‑time planning in large‑scale infrastructures.
In summary, the paper presents a rigorous, graph‑theoretic solution to the minimal dedicated actuator/sensor placement problem for LTI systems. By linking structural controllability (observability) to maximum matchings and SCC hierarchy, it provides exact minimality guarantees, enumerates all optimal configurations, and does so with polynomial‑time algorithms. The results have immediate practical relevance for the design of control and monitoring architectures in power systems, transportation networks, biological systems, and any large‑scale engineered network where actuator/sensor resources are limited.
Comments & Academic Discussion
Loading comments...
Leave a Comment