Optimisation of hybrid high-modulus/high-strength carbon fiber reinforced plastic composite drive
This study deals with the optimisation of hybrid composite drive shafts operating at subcritical or supercritical speeds, using a genetic algorithm. A formulation for the flexural vibrations of a composite drive shaft mounted on viscoelastic supports including shear effects is developed. In particular, an analytic stability criterion is developed to ensure the integrity of the system in the supercritical regime. Then it is shown that the torsional strength can be computed with the maximum stress criterion. A shell method is developed for computing drive shaft torsional buckling. The optimisation of a helicopter tail rotor driveline is then performed. In particular, original hybrid shafts consisting of high-modulus and high-strength carbon fibre reinforced epoxy plies were studied. The solutions obtained using the method presented here made it possible to greatly decrease the number of shafts and the weight of the driveline under subcritical conditions, and even more under supercritical conditions. This study yielded some general rules for designing an optimum composite shaft without any need for optimisation algorithms.
💡 Research Summary
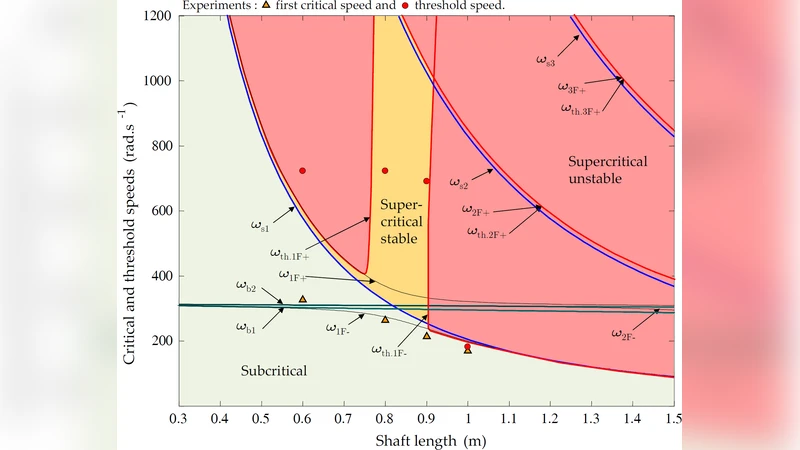
This paper presents a comprehensive methodology for the design and optimisation of hybrid carbon‑fiber reinforced polymer (CFRP) drive shafts that can operate either below or above their first critical speed (sub‑critical or super‑critical regimes). The authors first develop analytical models for the flexural and torsional dynamics of a tubular composite shaft supported on visco‑elastic bearings. By adopting Timoshenko beam theory with homogenised laminate properties (E, G, ν) and incorporating both internal (material hysteretic) and external (support) damping, they derive closed‑form expressions for the four critical speeds (forward/backward, forward/backward buckling) and an analytic stability criterion (Eq. 8) that predicts the onset of whirl instability in the super‑critical region. The stability condition explicitly involves the longitudinal loss factor η_i (computed from complex ply moduli) and the bearing loss factor η_e, allowing designers to assess whether a given operating speed is safely below the threshold speed ω_th.
For torsional vibration, classical laminate theory is used to compute the shear stress distribution under torque, and the maximum‑stress criterion (|σ_12| ≤ s and –X_0 ≤ σ_11 ≤ X) is shown to give better agreement with experimental data than the more conservative Tsai‑Wu failure index. This simplification is justified because, for the high‑strength (HS) carbon/epoxy plies, transverse fracture does not dominate the overall failure, whereas the high‑modulus (HM) plies are primarily responsible for axial stiffness.
Torsional buckling is addressed through an analytical shell‑theory approach based on Flügge’s equations for orthotropic cylindrical shells. By inserting the laminate stiffness matrices into the shell governing equations, the authors obtain a compact eigenvalue problem (K·U = 0) whose determinant yields the critical buckling torque. The displacement field is expressed as a combination of circumferential half‑waves (h) and axial half‑waves (p), and boundary effects are neglected because the shafts are assumed sufficiently long. This method dramatically reduces computational effort compared with full finite‑element buckling analyses while retaining accuracy, as validated against experimental buckling tests.
The optimisation framework employs a genetic algorithm (GA) that treats the number of plies, ply orientations, HM/HS ply ratios, shaft length, radius, and wall thickness as discrete design variables. The objective function minimises total shaft mass, while penalty terms enforce the three constraints: (1) the analytical stability condition (no whirl in the super‑critical regime), (2) the torsional strength limit from the maximum‑stress criterion, and (3) the torsional buckling limit from the shell analysis. The GA efficiently explores the combinatorial design space, converging after a few thousand generations to solutions that reduce the number of shafts and overall mass compared with conventional designs.
The methodology is applied to a helicopter tail‑rotor driveline previously studied in the literature. Conventional designs used only high‑modulus plies and required four separate shafts, resulting in a total driveline mass of about 12 kg. The GA‑optimised hybrid design combines HM plies (to maximise axial stiffness) in the shaft centre with HS plies (to maximise torsional strength) near the bearing locations. The optimal configuration uses only two shafts, with a reduced wall thickness and a modest increase in radius, achieving a mass reduction of roughly 25 % (≈9 kg total). Dynamic testing on a purpose‑built rig confirmed that the super‑critical operating speed (≈3000 rpm) lies safely below the predicted threshold, and that the shafts remain stable and free of buckling throughout prolonged runs.
In conclusion, the paper demonstrates that (i) a closed‑form analytical model for flexural dynamics with damping can reliably predict super‑critical stability, (ii) a simple maximum‑stress torsional strength criterion is sufficient for hybrid HM/HS laminates, (iii) an analytical shell‑theory buckling model provides rapid yet accurate buckling predictions, and (iv) a GA‑based optimisation that integrates these models yields lightweight, high‑performance hybrid drive shafts without the need for extensive finite‑element simulations. The authors suggest future work on multi‑objective optimisation (including vibration noise and fatigue), incorporation of nonlinear material behaviour, and adaptive control strategies based on real‑time health monitoring.
Comments & Academic Discussion
Loading comments...
Leave a Comment