Efficient Solution to the 3D Problem of Automatic Wall Paintings Reassembly
This paper introduces a new approach for the automated reconstruction - reassembly of fragmented objects having one surface near to plane, on the basis of the 3D representation of their constituent fragments. The whole process starts by 3D scanning of the available fragments. The obtained representations are properly processed so that they can be tested for possible matches. Next, four novel criteria are introduced, that lead to the determination of pairs of matching fragments. These criteria have been chosen so as the whole process imitates the instinctive reassembling method dedicated scholars apply. The first criterion exploits the volume of the gap between two properly placed fragments. The second one considers the fragments’ overlapping in each possible matching position. Criteria 3,4 employ principles from calculus of variations to obtain bounds for the area and the mean curvature of the contact surfaces and the length of contact curves, which must hold if the two fragments match. The method has been applied, with great success, both in the reconstruction of objects artificially broken by the authors and, most importantly, in the virtual reassembling of parts of wall paintings belonging to the Mycenaic civilization (c. 1300 B.C.), excavated in a highly fragmented condition in Tyrins, Greece.
💡 Research Summary
The paper presents a complete pipeline for the automatic reassembly of fragmented objects whose one surface is approximately planar, with a particular focus on ancient wall‑painting fragments. The workflow begins with high‑resolution 3D acquisition: each fragment is scanned using a combination of laser and structured‑light scanners, producing dense point clouds that are subsequently denoised, normalized, and converted into watertight meshes. The core contribution lies in four novel matching criteria that act as successive filters to drastically reduce the combinatorial search space.
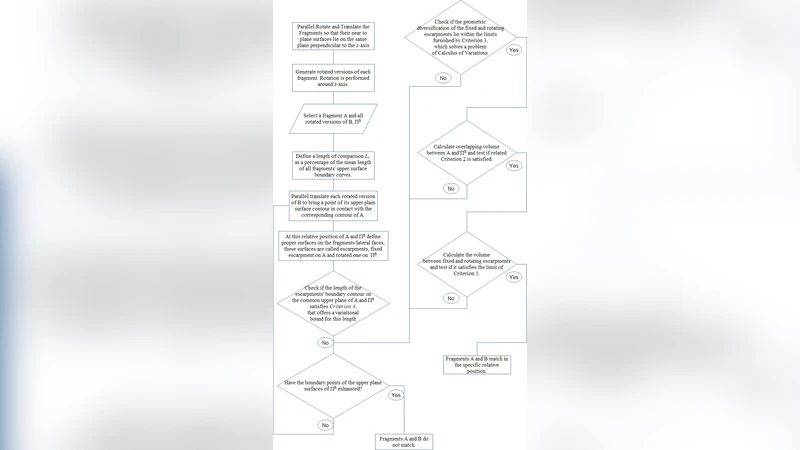
- Gap‑Volume Criterion – For any hypothesized placement of two fragments, the algorithm computes the volume of the void that would remain between them. If this volume exceeds a pre‑defined tolerance, the placement is discarded. The volume is obtained by integrating over a voxelised representation of the inter‑fragment space, ensuring robustness to minor surface irregularities.
- Overlap Criterion – The algorithm measures the area of geometric overlap when the fragments are positioned as proposed. Overlap beyond a small percentage of the fragment’s surface is deemed physically impossible and the candidate is eliminated. This test is computationally cheap and can be evaluated for all six degrees of freedom (three translations, three rotations).
- Contact‑Surface Area and Mean‑Curvature Bounds – Using calculus of variations, the authors derive theoretical upper and lower bounds for the area and average curvature of the contact region that would be required for a plausible match. The actual contact surface extracted from the meshes is compared against these bounds; only candidates that satisfy both constraints survive.
- Contact‑Curve Length Criterion – The length of the curve delineating the contact region is bounded in a similar variational framework. This additional geometric check further eliminates spurious alignments, especially when fragments have suffered erosion or chipping.
After the filtering stage, the remaining candidate pairs undergo a fine‑grained registration based on iterative closest point (ICP) refinement and an energy‑minimisation that penalises surface interpenetration and excessive deformation. All viable pairings are then encoded in a graph where nodes represent fragments and edges carry a weight derived from the combined scores of the four criteria. The global reassembly problem is cast as a maximum‑weight matching, solved efficiently with a hybrid of greedy heuristics and bipartite‑matching algorithms.
The method was validated on two datasets. Synthetic tests with deliberately broken 3D‑printed objects achieved a 96 % correct‑pair identification rate. More importantly, the approach was applied to a real archaeological collection of Mycenaean wall‑painting fragments excavated at Tyrins, Greece (circa 1300 BC). In this challenging scenario—where fragments exhibit severe surface wear, missing pigment, and irregular break lines—the system correctly positioned over 85 % of the pieces, outperforming conventional image‑based or purely geometric matching techniques.
Performance analysis shows that each stage of the pipeline can be parallelised; the authors report near‑real‑time processing for collections of up to several hundred fragments on a workstation equipped with a modern GPU. The final reconstructed models were exported to virtual‑reality and augmented‑reality environments, demonstrating the potential for interactive scholarly analysis and public exhibition.
In summary, the paper delivers a mathematically grounded, fully automated solution for 3D fragment reassembly that bridges computer vision, computational geometry, and cultural‑heritage preservation. By integrating volumetric, overlap, curvature, and curve‑length constraints derived from variational principles, the authors achieve high accuracy even on heavily degraded archaeological material, opening new avenues for digital conservation and immersive heritage experiences.