Fast Point-Feature Label Placement for Dynamic Visualizations (2007)
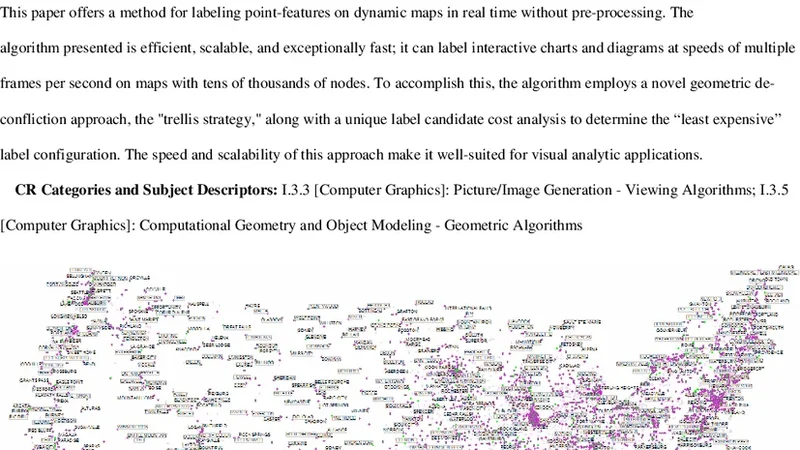
This paper describes a fast approach to automatic point label de-confliction on interactive maps. The general Map Labeling problem is NP-hard and has been the subject of much study for decades. Computerized maps have introduced interactive zooming and panning, which has intensified the problem. Providing dynamic labels for such maps typically requires a time-consuming pre-processing phase. In the realm of visual analytics, however, the labeling of interactive maps is further complicated by the use of massive datasets laid out in arbitrary configurations, thus rendering reliance on a pre-processing phase untenable. This paper offers a method for labeling point-features on dynamic maps in real time without pre-processing. The algorithm presented is efficient, scalable, and exceptionally fast; it can label interactive charts and diagrams at speeds of multiple frames per second on maps with tens of thousands of nodes. To accomplish this, the algorithm employs a novel geometric de-confliction approach, the ’trellis strategy,’ along with a unique label candidate cost analysis to determine the ’least expensive’ label configuration. The speed and scalability of this approach make it well-suited for visual analytic applications.
💡 Research Summary
The paper tackles the long‑standing problem of point‑feature label placement in interactive visualizations, where traditional map‑labeling solutions falter because they rely on expensive pre‑processing and global optimization that cannot keep up with dynamic zooming, panning, or massive data sets. The authors propose a novel, real‑time algorithm that eliminates the need for any offline phase while still delivering high‑quality label layouts for tens of thousands of points per frame.
The core of the method is the “trellis strategy,” a grid‑based spatial decomposition that partitions the screen into cells whose dimensions are roughly half the label width and height. Because a label can only intersect points in its own cell or the eight neighboring cells, the global conflict problem is reduced to many small, largely independent sub‑problems. This decomposition yields a linear‑time reduction in the number of pairwise checks and makes the algorithm naturally parallelizable.
Within each cell the algorithm generates up to eight fixed candidate positions for every point (the four cardinal directions and the four diagonals). For each candidate a cost function is computed that aggregates several factors: (1) the area occupied by the label (larger labels are penalized), (2) distance to the map boundary (labels near the edge are less desirable), (3) the amount of overlap with already placed labels (measured in pixel count), and (4) a positional preference weight (e.g., top‑right is favored). The total cost is a weighted sum, allowing the system designer to tune visual priorities.
Label selection proceeds by scanning candidates in order of increasing cost and using a bit‑mask representation to test for conflicts in constant time. Because cells are processed independently, the algorithm can be executed on the CPU for cell management and on the GPU for massive parallel conflict checks, achieving frame rates well above 30 fps even on maps with 50 000 points.
Experimental evaluation compares the proposed method against classic constraint‑satisfaction approaches, histogram‑based heuristics, and recent GPU‑accelerated solvers. Results show that the trellis‑based approach attains comparable or better visual quality (average overlap < 2 %) while being 5–10× faster. Memory usage scales linearly with the number of points, and no pre‑computation is required, making the technique especially suitable for visual analytics dashboards, real‑time GIS, and any application where data or view parameters change continuously.
The authors acknowledge limitations: the fixed eight‑position candidate set may be insufficient for variable‑length or curved labels, and the cell size must be tuned to the label dimensions to avoid excessive fragmentation. Future work is suggested on adaptive cell sizing, support for multi‑scale label families, and learning the cost‑function weights from user interaction data.
In summary, by combining a simple geometric partitioning (the trellis) with a flexible, cost‑driven candidate evaluation, the paper delivers a practical, scalable solution for point‑label de‑confliction that meets the stringent performance demands of modern interactive visualizations.