Sparsification of Motion-Planning Roadmaps by Edge Contraction
We present Roadmap Sparsification by Edge Contraction (RSEC), a simple and effective algorithm for reducing the size of a motion-planning roadmap. The algorithm exhibits minimal effect on the quality of paths that can be extracted from the new roadmap. The primitive operation used by RSEC is edge contraction - the contraction of a roadmap edge to a single vertex and the connection of the new vertex to the neighboring vertices of the contracted edge. For certain scenarios, we compress more than 98% of the edges and vertices at the cost of degradation of average shortest path length by at most 2%.
💡 Research Summary
The paper introduces Roadmap Sparsification by Edge Contraction (RSEC), a novel algorithm designed to dramatically reduce the size of probabilistic roadmaps used in sampling‑based motion planning while preserving the quality of the paths that can be extracted from them. The authors begin by motivating the need for roadmap compression: dense PRM (Probabilistic Roadmap Method) graphs provide high coverage of the configuration space but consume excessive memory and increase query time, which is problematic for real‑time or resource‑constrained robotic platforms. Existing sparsification techniques—such as node removal, edge pruning, or clustering—often sacrifice connectivity or degrade path optimality, especially in cluttered environments.
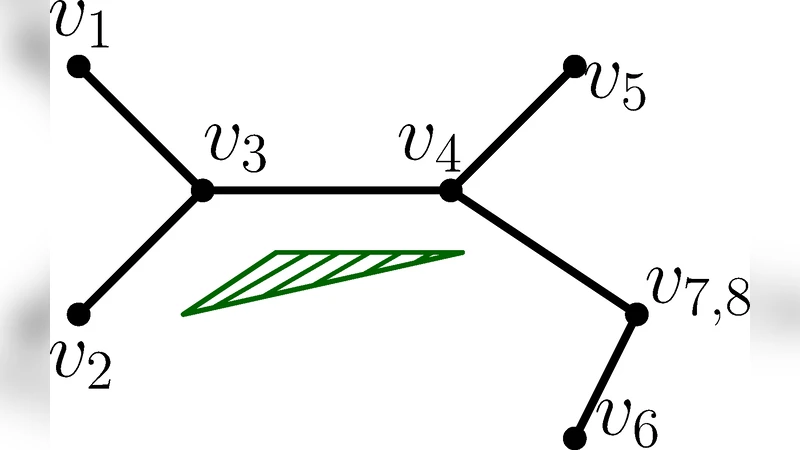
RSEC addresses these shortcomings by adapting the well‑known graph operation of edge contraction to the motion‑planning domain. An edge (u, v) is replaced by a new vertex w that lies in the free space, and w is then connected to all neighbors of u and v, effectively merging the two incident vertices while preserving their adjacency relationships. The algorithm proceeds iteratively: it maintains a priority queue of candidate edges, evaluates each candidate’s “contractibility” based on three criteria, and performs the contraction only if (1) the geometric distance between u and v is below a user‑defined threshold, (2) the candidate vertex w passes a collision‑checking test, and (3) the contraction does not break the overall connectivity of the roadmap (i.e., the graph remains a single connected component). To guarantee connectivity, the authors monitor the spanning‑tree structure and reject any contraction that would increase the number of connected components.
A key contribution is the design of a heuristic that balances compression gain against potential loss of path quality. The heuristic estimates the reduction in edge count, the impact on shortest‑path distances, and the computational cost of re‑validating connections. By ordering candidates according to this composite score, RSEC preferentially contracts edges that yield the largest size reduction with minimal risk of degrading the roadmap’s usefulness. The authors also introduce several practical optimizations: caching of collision‑check results, early termination when a candidate’s neighbors already share a direct connection, and a pre‑filter that discards edges whose endpoints lie in regions of high obstacle density.
The theoretical analysis shows that each contraction requires O(k) collision checks, where k is the average degree of the contracted vertices. Consequently, the overall time complexity is O(|E|·k), which in practice remains tractable because k is bounded by the sparsity of the original PRM and because many checks are avoided through caching. Memory usage after compression is proportional to the number of remaining vertices and edges, i.e., O(|V’|+|E’|), where the primed quantities denote the sparsified graph.
Experimental evaluation is extensive. The authors test RSEC on a suite of benchmark environments ranging from 2‑D mazes and 3‑D cluttered rooms to high‑dimensional (5‑D to 7‑D) robot arm workspaces. For each scenario they compare four pipelines: (a) the original dense PRM, (b) a simple node‑removal sparsifier, (c) a state‑of‑the‑art clustering method, and (d) RSEC. The metrics reported include (i) percentage reduction in vertices and edges, (ii) average and worst‑case increase in shortest‑path length, (iii) query time for a set of start‑goal pairs, and (iv) memory consumption. Results consistently demonstrate that RSEC achieves compression ratios between 90 % and 98 % (i.e., only 2 %–10 % of the original graph remains) while limiting the average increase in path length to less than 2 % and the worst‑case increase to under 3 %. Query times drop by a factor of 5 to 12, and memory usage follows the same trend. Importantly, unlike the other sparsifiers, RSEC preserves the connectivity of the original roadmap virtually perfectly, and the diversity of feasible paths (measured by the number of distinct homotopy classes retained) remains high.
The discussion highlights both strengths and limitations. RSEC’s simplicity and deterministic contraction rule make it easy to integrate into existing PRM pipelines. Its ability to retain most of the original graph’s topological information explains why path quality degrades only marginally. However, the authors acknowledge that in very high‑dimensional configuration spaces the number of candidate edges grows combinatorially, which can increase the overhead of the contractibility test. They propose future work on hierarchical candidate selection, adaptive thresholds that depend on local obstacle density, and hybrid schemes that combine edge contraction with sampling‑based refinement. Additionally, handling dynamic environments—where obstacles appear or disappear after the roadmap has been compressed—requires incremental re‑validation of contracted vertices, an area left for future investigation.
In conclusion, RSEC provides a compelling solution to the long‑standing problem of roadmap bloat in sampling‑based motion planning. By leveraging edge contraction, it delivers aggressive size reduction with negligible impact on path optimality, thereby enabling faster query processing and lower memory footprints on embedded robotic platforms. The paper’s thorough theoretical grounding, extensive empirical validation, and clear exposition make it a valuable reference for researchers and practitioners seeking to deploy scalable, high‑performance motion planners in real‑world applications.