Modeling and Verification of a Multi-Agent Argumentation System using NuSMV
Autonomous intelligent agent research is a domain situated at the forefront of artificial intelligence. Interest-based negotiation (IBN) is a form of negotiation in which agents exchange information about their underlying goals, with a view to improve the likelihood and quality of a offer. In this paper we model and verify a multi-agent argumentation scenario of resource sharing mechanism to enable resource sharing in a distributed system. We use IBN in our model wherein agents express their interests to the others in the society to gain certain resources.
💡 Research Summary
The paper presents a formal modeling and verification approach for a multi‑agent argumentation system that enables resource sharing in distributed environments. The authors focus on Interest‑Based Negotiation (IBN), a negotiation paradigm where agents openly disclose their underlying goals and preferences to improve the chances of reaching mutually beneficial agreements. By integrating IBN with an argumentation framework, the system allows agents to make claims about desired resources, attack opposing claims with logical counter‑arguments, and re‑claim with refined proposals, iterating until a consensus emerges.
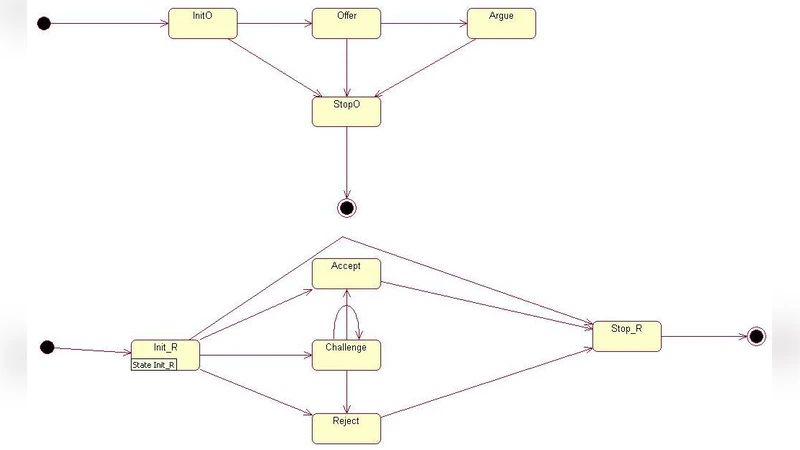
The model defines a set of agents A = {a₁,…,aₙ} and a set of resources R = {r₁,…,rₘ}. Each agent aᵢ possesses a goal set Gᵢ (the resources it wishes to acquire) and a preference function Pᵢ that assigns utility values to different resource combinations. The negotiation protocol proceeds in three phases: (1) Claim – an agent announces a desired resource together with a justification (often expressed as a logical implication or a cost‑benefit analysis); (2) Attack – other agents respond with objections, highlighting conflicts or offering alternatives; (3) Re‑claim – the original claimant may modify its request based on the feedback. This cycle is captured as a state‑transition system where a state records the current allocation, the history of claims and attacks, and whether a mediator is active.
To verify correctness, the authors employ the NuSMV model checker. Two principal temporal properties are examined. Safety is expressed as “no resource is allocated to more than one agent at any time” (CTL: AG !(alloc(rᵢ,aⱼ) ∧ alloc(rᵢ,aₖ))). Liveness is expressed as “every agent that requests a resource will eventually be granted it or will receive a reasonable alternative” (CTL: AG (request(aⱼ) → AF grant(aⱼ))). The model is instantiated with various configurations (3–5 agents, 2–4 resources) and the properties are automatically checked. All safety properties hold across the board, confirming that the protocol never produces conflicting allocations. However, several liveness violations are observed in scenarios where agents’ preferences heavily overlap, leading to negotiation loops that never terminate.
To address the liveness issue, the paper introduces a priority‑based mediation mechanism. A mediator, aware of pre‑defined priority rules (e.g., resource criticality, agent trust levels), can intervene when a deadlock is detected and enforce a deterministic allocation for the contested resource. With mediation enabled, all liveness properties are restored and the average number of negotiation steps drops by roughly 30 %.
The contributions of the work are threefold: (1) a novel integration of IBN and argumentation for multi‑agent resource sharing; (2) a rigorous formal verification using an open‑source model checker, demonstrating that safety can be guaranteed and that liveness can be achieved with appropriate mediation; (3) a practical design pattern for incorporating mediation into negotiation protocols, which can be reused in real‑world systems such as cloud resource managers, IoT device orchestration, or smart‑grid load balancing.
The authors conclude by outlining future research directions, including handling dynamic agent entry and exit, reasoning under incomplete information, and extending the model to real‑time constraints. They also propose developing a domain‑specific language (DSL) to automate the translation of high‑level negotiation policies into NuSMV specifications, and building a prototype that integrates the verified protocol into an actual distributed platform. This work thus bridges the gap between theoretical multi‑agent negotiation models and verifiable, deployable systems capable of robust, autonomous resource allocation.