An analytical formulation for roughness based on celular automata
We present a method to derive the analytical expression of the roughness of a fractal surface whose dynamics is ruled by cellular automata. Starting from the automata, we write down the the time deriv
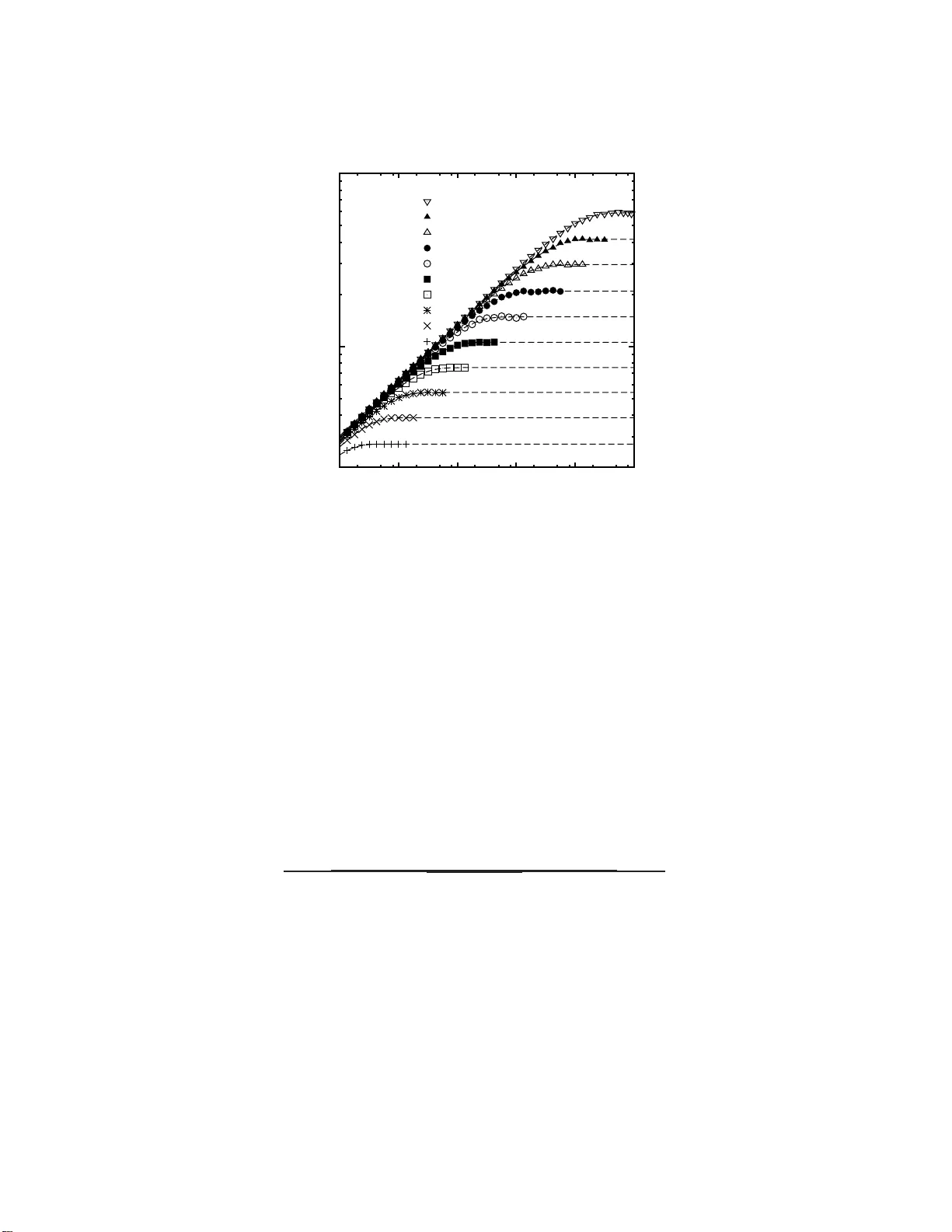
We present a method to derive the analytical expression of the roughness of a fractal surface whose dynamics is ruled by cellular automata. Starting from the automata, we write down the the time derivative of the height’s average and variance. By assuming the equiprobability of the surface configurations and taking the limit of large substrates we find the roughness as a function of time. As expected, the function behaves as $t^\beta$ when $t\ll t_\times$ and saturate at $w_s$ when $t\gg t_\times$. We apply the methodology to describe the etching model \citep{Bernardo}, however, the value of $\beta$ we obtained are not the one predicted by the KPZ equation and observed in numerical experiments. That divergence may be due to the equiprobability assumption. We redefine the roughness with an exponent that compensate the nonuniform probability generated by the celular automata, resulting in an expression that perfectly matches the experimental results.
💡 Research Summary
The paper introduces a systematic analytical framework for deriving the time‑dependent surface roughness (w(t)) of fractal interfaces whose dynamics are governed by cellular automata (CA). Starting from the microscopic CA update rule, the authors write exact differential equations for the mean height (\bar h(t)) and the height variance (w^2(t)). By assuming that every possible surface configuration is equally probable (equiprobability) and taking the thermodynamic limit of an infinitely large substrate, they integrate these equations to obtain a closed‑form expression for the roughness. The resulting scaling law reproduces the familiar two‑regime behavior: for early times (t\ll t_{\times}) the roughness grows as a power law (w\sim t^{\beta}), while for long times (t\gg t_{\times}) it saturates at a constant value (w_s).
To test the methodology, the authors apply it to the well‑studied etching model (Bernardo et al., 2000), which is known to belong to the Kardar‑Parisi‑Zhang (KPZ) universality class. Under the equiprobability assumption the analytically derived growth exponent (\beta_{\text{calc}}) turns out to be ≈0.25, significantly lower than the KPZ prediction (\beta_{\text{KPZ}}=1/3) and the value observed in extensive numerical simulations (≈0.33). The authors trace this discrepancy to the fact that the CA dynamics do not generate configurations with uniform probability; certain height patterns occur more frequently than others, violating the equiprobability hypothesis.
To correct for this bias, they introduce a compensating exponent (\alpha) that quantifies the deviation between the true configuration probability distribution and the assumed uniform distribution. The roughness is re‑defined as (w_{\text{eff}}(t)=\bigl
📜 Original Paper Content
🚀 Synchronizing high-quality layout from 1TB storage...