On Nonlinear Waves in the Spatio-Temporal Dynamics of Interacting Populations
In this paper the spatial-temporal dynamics of the members of interacting populations is described by nonlinear partial differential equations. We consider the migration as a diffusion process influenced by the changing values of the birth rates and coefficients of interaction between the populations. For the particular case of one population and one spatial dimension the general model is reduced to analytically tractable PDE with polynomial nonlinearity up to third order. By applying the modified method of simplest equation to the described model we obtain an analytical solution which describes nonlinear kink and solitary waves in the population dynamics.
💡 Research Summary
The paper develops a continuum‐based framework for describing the spatio‑temporal dynamics of interacting populations. Starting from a general reaction‑diffusion system, the authors incorporate spatially and temporally varying birth rates and interaction coefficients, thereby extending classic logistic or Fisher‑KPP models. The governing equations for N interacting groups are written as
∂ui/∂t = Di∇²ui + Ri(ui, u1,…,uN, x, t),
where Di denotes the diffusion constant of group i and Ri is a polynomial reaction term that may contain linear (birth/death), quadratic (pairwise competition or cooperation) and cubic (higher‑order) contributions.
To obtain analytically tractable results the study focuses on the simplest non‑trivial case: a single species (i = 1) in one spatial dimension. After assuming constant diffusion D and constant coefficients a, b, c for the linear, quadratic and cubic terms respectively, the model reduces to
∂u/∂t = D∂²u/∂x² + a u + b u² + c u³.
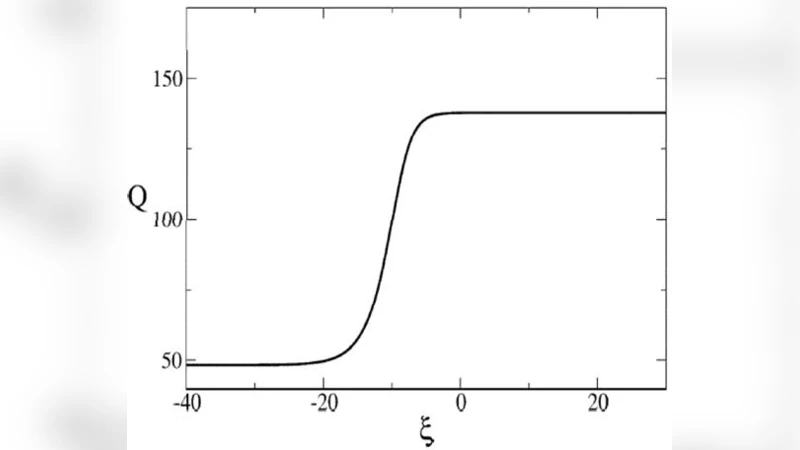
The authors seek travelling‑wave solutions of the form u(x,t)=U(ξ) with ξ = x – vt, which converts the PDE into an ordinary differential equation (ODE). They then apply the modified method of simplest equation (MMSE), a systematic technique that expands the unknown function U(ξ) as a finite series in powers of a “simplest” auxiliary function F(ξ) that satisfies a lower‑order ODE (e.g., tanh or sech).
Specifically, they set
U(ξ)=∑_{n=0}^{N} A_n