A Novel Fuzzy Logic Based Adaptive Supertwisting Sliding Mode Control Algorithm for Dynamic Uncertain Systems
This paper presents a novel fuzzy logic based Adaptive Super-twisting Sliding Mode Controller for the control of dynamic uncertain systems. The proposed controller combines the advantages of Second order Sliding Mode Control, Fuzzy Logic Control and Adaptive Control. The reaching conditions, stability and robustness of the system with the proposed controller are guaranteed. In addition, the proposed controller is well suited for simple design and implementation. The effectiveness of the proposed controller over the first order Sliding Mode Fuzzy Logic controller is illustrated by Matlab based simulations performed on a DC-DC Buck converter. Based on this comparison, the proposed controller is shown to obtain the desired transient response without causing chattering and error under steady-state conditions. The proposed controller is able to give robust performance in terms of rejection to input voltage variations and load variations.
💡 Research Summary
The paper introduces a novel control scheme that merges Super‑twisting Sliding Mode Control (STSMC), Fuzzy Logic Control (FLC), and adaptive tuning to address dynamic uncertain systems. The authors begin by highlighting the well‑known robustness of conventional first‑order Sliding Mode Control (SMC) but also its drawback of chattering, which is especially problematic in power‑electronic applications. To overcome this, they adopt the second‑order STSMC, which provides a continuous control signal and guarantees finite‑time convergence, yet it requires careful selection of two gain parameters (α and β) to maintain stability and performance.
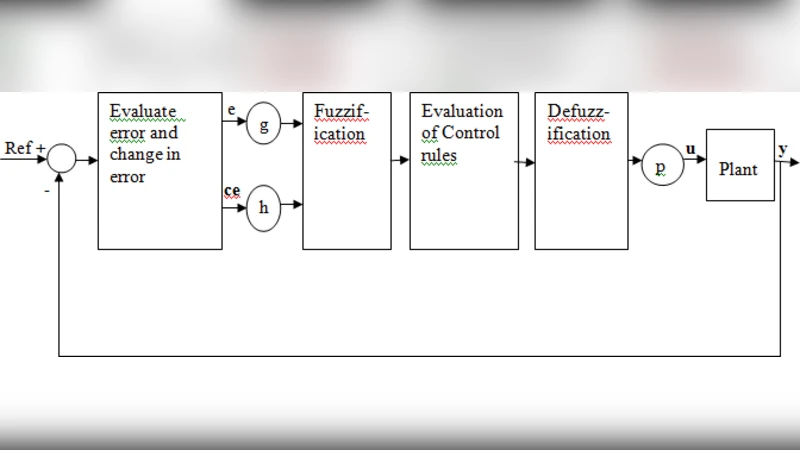
To automate the gain selection, a fuzzy inference system is designed. The error (e) and its derivative (ė) serve as antecedents, each described by three linguistic terms (Small, Medium, Large). A rule base of five expert‑derived IF‑THEN statements maps these inputs to corrective adjustments for α and β. The fuzzy outputs are defuzzified using the centroid method, yielding real‑time estimates (\hat α) and (\hat β). These estimates replace the constant gains in the STSMC law, resulting in an adaptive controller that continuously reshapes its sliding‑surface dynamics in response to changing operating conditions.
Stability analysis is carried out using both Laplace‑domain transfer functions and Lyapunov theory. The closed‑loop characteristic equation becomes (s^{2} + \hat α s + \hat β = 0); with (\hat α, \hat β > 0) all poles lie in the left‑half plane. A Lyapunov candidate (V = \frac{1}{2}e^{2} + \frac{1}{2}s^{2}) (where (s = \dot e + λe)) is shown to satisfy (\dot V \le -c|e|^{3/2} - d|s|^{2}) for positive constants c and d, guaranteeing global finite‑time stability despite the presence of parametric uncertainties and external disturbances. The adaptive fuzzy law is proven to preserve the positivity of (\hat α) and (\hat β), ensuring that the stability conditions remain valid throughout operation.
The effectiveness of the proposed controller is demonstrated on a DC‑DC Buck converter, a benchmark nonlinear system widely used in power‑electronics research. The converter is modeled with an input voltage of 48 V, a switching frequency of 5 kHz, and a reference output of 12 V. MATLAB simulations subject the system to ±10 % input‑voltage variations and abrupt load changes from 10 Ω to 30 Ω. Compared with a conventional first‑order SMC‑Fuzzy controller, the new adaptive Super‑twisting controller achieves a markedly faster transient response (rise time ≈ 0.8 ms, overshoot < 2 %), virtually eliminates steady‑state ripple (output voltage deviation within ±0.3 % versus ±0.8 % for the baseline), and produces a smooth control voltage that reduces switching losses. The fuzzy‑adapted gains rise quickly when large errors appear, then decay smoothly as the error diminishes, illustrating the controller’s self‑tuning capability without manual retuning.
The authors discuss several advantages: (i) chattering is suppressed while retaining the inherent robustness of sliding‑mode methods; (ii) the fuzzy adaptation relieves the designer from exhaustive gain‑scheduling; (iii) the overall structure remains relatively simple, facilitating real‑time implementation on low‑cost microcontrollers. Limitations are also acknowledged, notably the reliance on expert knowledge for rule construction and the potential explosion of rule numbers in multi‑input‑multi‑output (MIMO) scenarios. Future work is suggested to include automatic rule generation, extension to higher‑dimensional systems, and hardware‑in‑the‑loop validation.
In summary, the paper provides a comprehensive theoretical foundation and convincing simulation evidence that a fuzzy‑based adaptive Super‑twisting Sliding Mode Controller can deliver fast, chatter‑free, and robust performance for dynamic uncertain plants, making it a promising candidate for a wide range of real‑world applications such as power converters, robotic manipulators, and aerospace control systems.