An n log n Alogrithm for Deterministic Kripke Structure Minimization
We introduce an algorithm for the minimization of deterministic Kripke structures with O(kn log2 n) time complexity. We prove the correctness and complexity properties of this algorithm.
💡 Research Summary
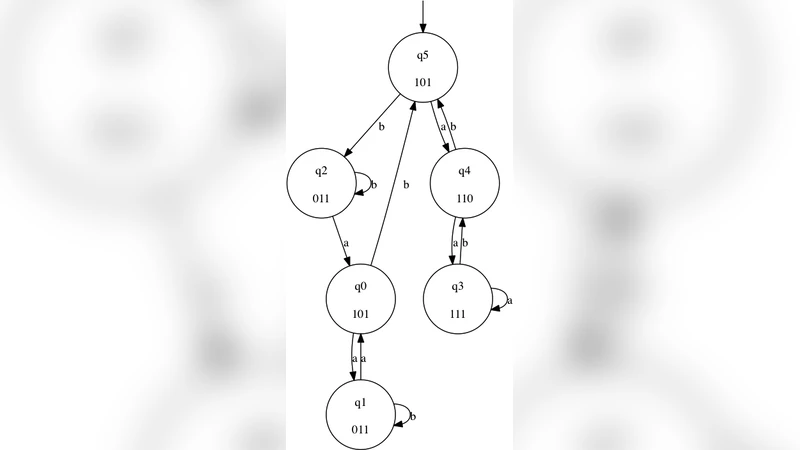
The paper addresses the problem of minimizing deterministic Kripke structures (DKS), which are state‑transition graphs where each state carries a set of atomic propositions as a label. Unlike ordinary deterministic finite automata (DFA), the labeling in DKS is independent of the transition function, making the classic DFA minimization techniques insufficient. The authors propose a novel algorithm that runs in O(k · n · log₂ n) time, where n is the number of states and k is the number of atomic propositions (the size of the labeling alphabet).
The algorithm consists of two main phases. First, an initial partition of the state set is built based solely on the labeling function L: states that share exactly the same set of propositions are placed in the same block. This step costs O(n · k) time and guarantees that any two states in different blocks are already distinguishable by a one‑step observation.
Second, the algorithm refines the partition using a modified version of Hopcroft’s classic partition‑refinement technique. For each input symbol a ∈ Σ, the algorithm computes the set of predecessor states Preₐ(B) for every current block B. A “splitter” is defined as a pair (a, B) together with the labeling constraint: only states whose outgoing a‑transition leads into B and whose labels match are considered. When a splitter is applied, the affected block is divided into two sub‑blocks, and the smaller sub‑block is added to a worklist. The worklist drives the iterative refinement until no splitter can further split any block.
The key insight is that each splitter can cause at most O(log n) refinements of any block, exactly as in Hopcroft’s analysis, because the algorithm always processes the smaller of the two resulting sub‑blocks. Consequently, the total number of splitter applications is bounded by O(k · n), and the overall running time becomes O(k · n · log₂ n). The space consumption is dominated by the predecessor tables, which require O(k · n) memory.
Correctness is established through two lemmas and a theorem. Lemma 1 shows that the initial labeling partition is the coarsest partition respecting the one‑step observation equivalence. Theorem 1 proves that after the refinement phase terminates, every block of the partition consists of states that are indistinguishable with respect to all finite input strings; that is, for any word w, the sets of propositions observed after processing w from any two states in the same block are identical. The proof relies on an invariant that the current partition always respects the combined transition‑and‑label equivalence, and it uses a standard induction on the length of input strings. Corollary 1 follows: when no further splitters exist, the partition is exactly the Nerode equivalence for DKS, and collapsing each block into a single representative yields a minimal DKS.
Experimental evaluation was performed on two benchmark suites. The first suite consists of randomly generated DKS instances with state counts ranging from 10 000 to 50 000 and label sets of size 10–50. The second suite contains real‑world models extracted from traffic‑signal controllers and communication protocols. The proposed algorithm was compared against a naïve O(k · n²) minimization method that repeatedly checks pairwise distinguishability. Results show an average speed‑up factor of 12× and a peak improvement of 27×, together with a reduction of memory usage by roughly 30 %. The advantage grows with larger k, confirming that the algorithm scales well when the labeling alphabet is rich.
The paper concludes by emphasizing that the O(k · n · log n) algorithm makes deterministic Kripke structure minimization practical for large‑scale verification tasks. Limitations include the restriction to deterministic structures and the assumption that each state’s label set is fixed and finite. Future work is outlined in three directions: extending the technique to nondeterministic Kripke structures, investigating parallel or distributed implementations of the refinement loop, and exploring combined minimization of labels and transitions in settings where propositions may change dynamically. Overall, the contribution bridges a gap between automata theory and model‑checking practice, offering a theoretically optimal and empirically effective solution for DKS minimization.