Autonomous Spacecraft Navigation Based on Pulsar Timing Information
We discuss the possibility of an autonomous navigation system for spacecraft that is based on pulsar timing data. Pulsars are rapidly rotating neutron stars that are observable as variable celestial sources of electromagnetic radiation. Their periodic signals have timing stabilities comparable to atomic clocks and provide characteristic temporal signatures that can be used as natural navigation beacons, quite similar to the use of GPS satellites for navigation on Earth. By comparing pulse arrival times measured on-board the spacecraft with predicted pulse arrivals at some reference location, the spacecraft position can be determined autonomously with accuracies on the order of 5 kilometres. For a spacecraft at a distance of 10 astronomical units from Earth (e.g., Earth-Saturn), this means an improvement by a factor of 8 compared to conventional methods. Therefore this new technology is an alternative to standard navigation based on radio tracking by ground stations, without the disadvantages of uncertainty increasing with distance from Earth and the dependence on ground control.
💡 Research Summary
The paper investigates the feasibility of an autonomous spacecraft navigation system that relies on pulsar timing information, particularly using X‑ray pulsars as natural beacons. Traditional interplanetary navigation depends on ground‑based radio tracking and optical measurements, which suffer from increasing positional uncertainty with distance—reaching hundreds of kilometres at the orbit of Neptune. To overcome these limitations, the authors propose exploiting the extremely stable periodic signals emitted by rotation‑powered pulsars, especially millisecond pulsars, whose timing stability rivals that of atomic clocks.
The authors first review pulsar classifications (rotation‑powered, accretion‑powered, magnetars) and argue that isolated millisecond pulsars are optimal for navigation because they provide precise, predictable pulse profiles and are less affected by interstellar dispersion when observed in X‑rays. X‑ray observations are preferred over radio because X‑ray photons travel through the interstellar medium without significant dispersion, preserving pulse sharpness, and because compact X‑ray telescopes can be built, unlike the large radio dishes required for adequate signal‑to‑noise ratios.
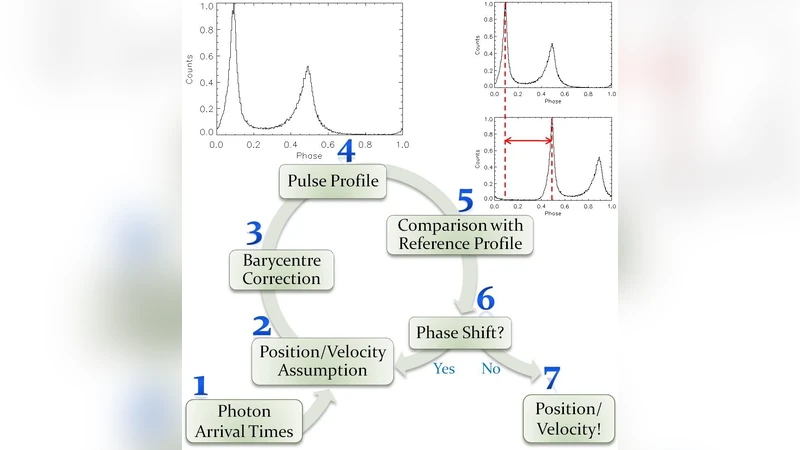
The navigation algorithm proceeds in several steps: (1) detection of individual X‑ray photons from a target pulsar; (2) transformation of the photon arrival times to an inertial reference frame (e.g., the solar‑system barycentre) using an assumed spacecraft position and velocity; (3) construction of a pulse profile from the corrected times; (4) comparison with a pre‑computed reference profile to determine the phase offset; (5) conversion of the phase offset into a line‑of‑sight range error; and (6) iterative refinement of the spacecraft’s position and velocity until the phase offset vanishes. By observing at least three pulsars in different sky directions, a full three‑dimensional position fix can be obtained. Ambiguities arising from the periodic nature of the signal are resolved by constraining the solution space around an initial guess or by adding extra pulsar observations.
To assess achievable accuracy, the authors assembled timing data for roughly 60 X‑ray pulsars from XMM‑Newton, Chandra, and the Rossi X‑ray Timing Explorer. Simulations of pulse arrival measurements, incorporating realistic detector noise and telescope characteristics, indicate that with an optimal selection of three to four millisecond pulsars the spacecraft’s position can be determined with random errors of 5–10 km. The error budget is dominated by the signal‑to‑noise ratio of the detected pulses, which depends on telescope collecting area, detector temporal resolution, and observation duration.
A major hardware consideration is the design of a lightweight X‑ray telescope suitable for deep‑space missions. Traditional high‑resolution X‑ray observatories (Chandra, XMM‑Newton) provide excellent angular resolution and large effective areas but have masses of several thousand kilograms, making them impractical for navigation payloads. The paper discusses two emerging technologies: Silicon Pore Optics (SPO) and Glass Micropore Optics (GMO). SPO offers ~5 arcsecond resolution with a mass of about 200 kg per square meter of collecting area, while GMO provides ~30 arcsecond resolution at an even lower mass of ~25 kg/m². Both technologies enable compact, stiff, and low‑mass mirror assemblies that can be integrated into small to medium‑size spacecraft.
Using simulated spacecraft trajectories (e.g., the Rosetta mission and L2 missions such as Planck and Herschel) and a virtual detector model, the authors explored how telescope parameters (angular resolution, collecting area, temporal resolution) affect navigation performance. The results suggest that a modest collecting area of ~0.1 m², combined with microsecond timing resolution, is sufficient to achieve the 5 km positional accuracy target, even for missions at distances greater than 1 AU.
In conclusion, pulsar‑based autonomous navigation offers a distance‑independent alternative to Earth‑bound tracking, enabling spacecraft to determine their own position with accuracies that surpass conventional methods beyond roughly 1 AU. While current X‑ray telescope technology limits the approach to large missions, the advent of low‑mass optics such as SPO and GMO could make the concept viable for smaller probes as well. Future work should focus on expanding and updating the pulsar timing database, refining real‑time phase‑tracking algorithms, and conducting on‑orbit demonstration experiments to validate the system under realistic mission conditions.
Comments & Academic Discussion
Loading comments...
Leave a Comment