A New Position Control Strategy for VTOL UAVs using IMU and GPS measurements
We propose a new position control strategy for VTOL-UAVs using IMU and GPS measurements. Since there is no sensor that measures the attitude, our approach does not rely on the knowledge (or reconstruction) of the system orientation as usually done in…
Authors: Andrew Roberts, Abdelhamid Tayebi
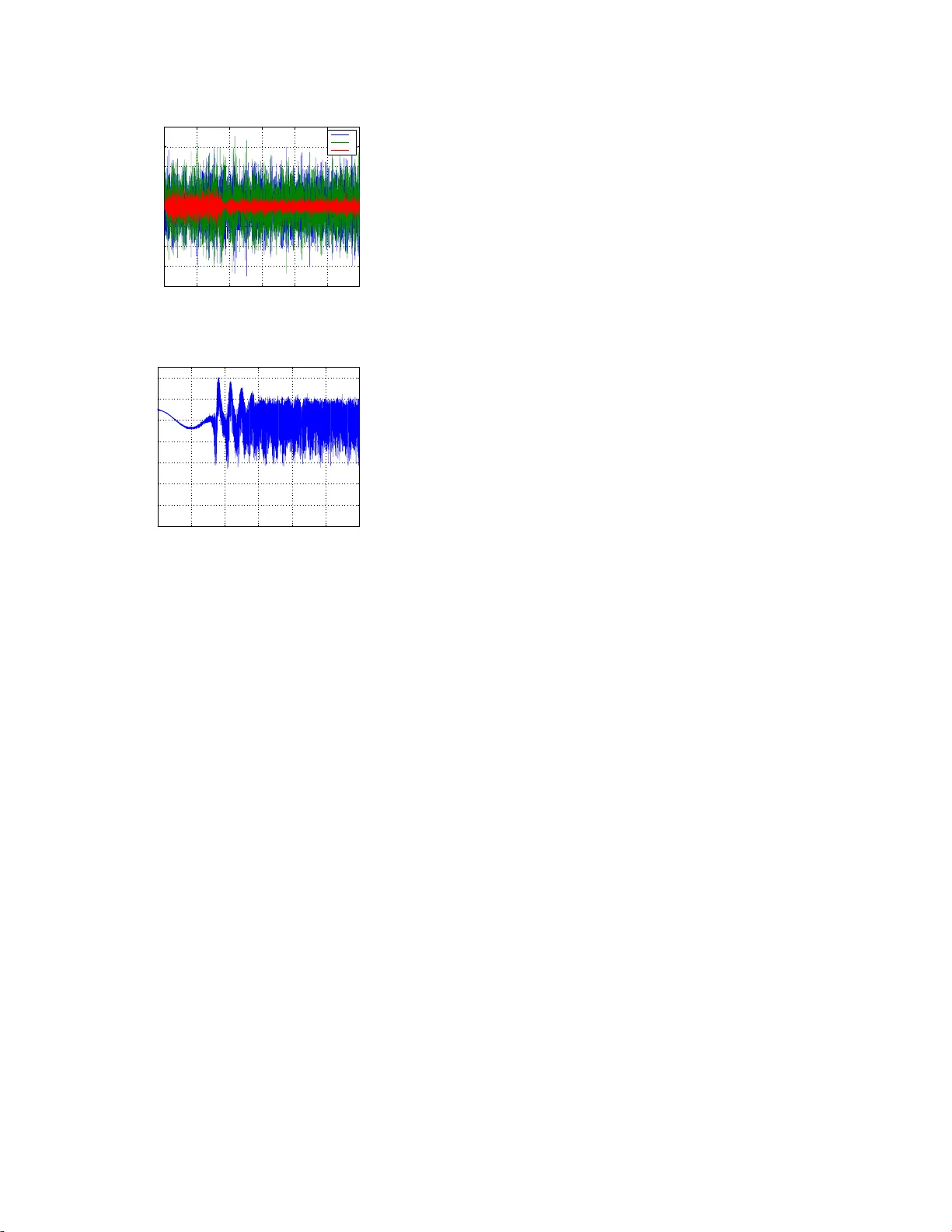
A New P osition Control Strategy for VTOL UA Vs us ing IMU and GPS measure men ts Andrew Rob erts a , Ab delhami d T a y ebi a , b a Dep ar tment of Ele ct ric al and Computer Engine ering, University of Western Ontario, L ondon , Ontario, Canada, N6A 3K7. b Dep ar tment of Ele ctric al Engi ne ering, L akehe ad University, Thunder Bay, Ontario, Canada P7B 5E1 Abstract W e prop ose a new position contro l strategy for VTOL-UA Vs using IMU and GPS measurements. Since there is n o sensor that measures the attitude, our approach does n ot rely on the knowledge (or reconstruction) of the system orientatio n as usually done in the existing literature. Instead, IMU and GPS measuremen ts are directly incorp orated in the control law . An imp ortant feature of the prop osed strategy , is that the accelerometer is used to measure the apparent acceleration of the vehicle, as opp osed to only measuring the gravit y vector, whic h w ould otherwise lead to unexp ected p erformance when the vehicle is accelerating (i.e. not in a h o ver configuration). S im ulation results are provided to demonstrate the p erformance of the prop osed p osition control strategy in th e presence of noise and disturb ances. Key wor ds: VTOL, UA V, vector measurmen ts, p osition contro l, 1 In tro duction The design of po s ition controllers for V ertical tak e- off and landing (VTOL) unmanned airb or ne v ehicles (UA V s) ha s b een the fo cus of several resea rch groups, which has r esulted in significant breakthro ughs in this field, for example see (Abdess a meud and T ay ebi, 201 0), (Aguiar and Hespanha, 2007 ), (F razzoli et al., 200 0), (Hauser et a l., 199 2), (Hua et a l., 200 9), (Pflimlin et al., 2007) and (Ro ber ts and T ay ebi, 2011 a). E xisting p osi- tion cont roller s, usually require tha t the s ystem states are accurately known or measured, na mely the p osition, linear velocity , angular velo city and the o rientation. F o r outdo or applicatio ns a global p ositioning system (GPS) mounted to the sys tem can b e used to pr ovide the p o- sition and velocity meas ur ements, while the angular velocity is obta ined using a gyros cop e which is included in the inertial meas ur ement unit (IMU) in addition to an acc elerometer and a magnetometer. How ever, ther e do es not exist any sensor that pro vides directly the orientation of a r igid bo dy . Motiv ated b y this pro blem, the study of rigid-b o dy attitude estimation has s een sub- ⋆ This pap er was not presented at any IF AC meeting. Cor- respond ing aut hor A . T a yebi. T el. +1 (807) 343-8597. F ax +1 (807) 766-7243. Email addr esses: arober88 @uwo.ca (Andrew R ob erts), atayebi@la keheadu.ca (Ab delhamid T ay ebi). stantial br eakthroug hs due to the efforts of the resear ch communit y (see, for ins tance, (Mahony et al., 2008) ). How ever, we are not aw a re of any work in the liter ature, providing a rigo rous results for the combination of an attitude obser ver and a p os ition controller for VTOL- UA V s. T o a ddress this shortco ming, there ha s b een some effort to design po sition control alg o rithms which do not di- rectly req uire the measure ment of the sy s tem attitude. F or example, in (Rob erts and T ayebi, 2011b) the a uthors prop ose a p ositio n control law which utilizes a num b er of ve ctor me asu r ements as a means to eliminate the requirement for the a ttitude measurement. By v ector measurements w e a re referring to the bo dy-referenced measurements o f vectors whose co ordinates ar e known in the inertial frame. Since the vector measur ement s contain information ab out the system o rientation, it has b een shown that they ca n be applied directly to the p os ition controller thereby eliminating the need o f the observer completely . Consequently , the resulting vector-measurement-based p osition control laws do not require the direct mea surement of the system attitude, nor do they require a n attitude observer which provides practitioners with a simpler, reduced order closed lo op system, with a ccompanying pro ofs for stability . Unfortunately , the vector-meas ur ements based p osi- tion con tr ol str a tegy c a n be susceptible to a problem asso ciated with the la ck of s ensors which can provide Preprint submitted to Automatica 31 Octob er 2018 suitable vector measur ements. This shortcoming stems from the fac t that the t wo sensor s most commonly used to provide vector measurements a re the magneto me- ter and a ccelerometer , used to provide b o dy-r eferenced measurements of the E arths magnetic field and gravity vector, resp ectively . Ho wev er , in order to satisfy the requirement that the accelerometer provides a measure- men t of the gravit y vector only , o ne must a s sume that the b o dy-fixed fra me is no n- accelera ting . It is clear that this condition is not gua ranteed to b e sa tisfied in s ome applications inv olving VTOL UA Vs. Of co urse, this practical limitation is r elev ant to b oth vector-measurement-based p osition controllers and a t- titude obse rvers which use accelerometer s. F ortunately , this limitatio n has led to the development of a new class of a ttitude observers which uses the accelero meter (and magnetometer) to provide v ector-meas urements. This t ype o f observer ac k nowledges the fact that the accelerometer meas ures a combin ation of the gravit y vector and the acceleration of the rigid-bo dy in the bo dy-fixed frame. This combination of the g ravit y vec- tor and linear acceleration in the inertial refere nce frame is commonly referred to as the app ar ent ac c eler ation . This inertial vector vio lates the requirement of many of the v ector-mea surement-based attitude o bs ervers, since the system acceler ation is not known in the iner tial frame of r e ference. In or der to deal with the fact that the inertial vector is unknown, this type of attitude ob- server us e s the velo c it y of the rigid-b o dy (assumed to be measur able using, for instance, a GPS) in addition to the signals o btained from an IMU. The s e attitude observers, which are often re ferred to as velo city-aide d attitude observers , can b e found in (Bonnab el et al., 2008), (Martin a nd Sala ¨ un, 2 008) and (Martin and Sala ¨ un, 2 010) with lo c al stability pro ofs , a nd in (Hua, 2010) with almos t semigloba l sta bilit y res ults. In this pap er we prop ose a new p osition co nt rol ap- proach which obviates the r equirement o f the system attitude measurement by us ing the vector mea s ure- men ts directly in the con tr ol la w. W e spec ifically use a magnetometer and accelerometer to provide the tw o vector measur e ments. The accelerometer is used to mea- sure the system app ar en t ac c eler ation , rather than the gravit y vector only . Using our pr o p osed appro ach, we show that, up on a suitable choice o f the co ntrol gains, all system states remain b ounded, and the system po - sition co nverges to a constant r eference p osition. Our prop osed co nt rol strateg y 1) do es no t requir e direct measurement of the system attitude; 2) do es not requir e the us e of a n attitude o bserver; 3) uses an acceler o meter to pr ovide a vector mea surement without limiting the motion of the s ystem to a near-hover s tate. 2 Bac kground In this section we pr esent some of the necessary mathe- matical details we use througho ut the pap er. In section 2.1 w e descr ib e tw o commonly used attitude representa- tions (r otation matrices and unit-quaternion). In s e ction 2.2 we define functions which are necessa ry in develop- ing the prop os ed control laws. 2.1 Attitude Rep r esentation T o represent the orientation of the air craft (rigid-b o dy), we define tw o refer ence fra mes : An inertial fra me I , which is r igidly attached the Earth (assumed flat), and a b o dy frame B which is rigidly attached to the a ircraft center of gravit y (COG). The orthonor mal basis of B is taken suc h that the x a xis is direc ted tow a rds the front of the air c r aft (or rig id b o dy), the y ax is is taken to- wards the star bo ard (right) side, and the z axis is di- rected down wards (o pp o s ite the dire c tio n of the system thrust). Throughout the pap er we often refer to the orientation of the r igid-b o dy , by which w e mean the relative an- gular p ositio n o f B with resp ect to I . The g oal o f the attitude repres entation is to mathematically desc r ib e the orientation of the rigid-b o dy . The unit-quaternion, which is a unit vector on R 4 , is given by Q = ( η , q ) ∈ Q , where η ∈ R is the quaternion-sca lar and q ∈ R 3 is the quaternion-vector, and Q is the set of unit-q uaternion defined by Q ≡ Q ∈ R × R 3 , k Q k = 1 . (1) Let Q 1 = ( η 1 , q 1 ) ∈ Q , Q 2 = ( η 2 , q 2 ) ∈ Q denote tw o unit-quaternion; then the quaternion pr o duct of Q 1 and Q 2 , denoted b y Q 3 = ( η 3 , q 3 ) ∈ Q is defined b y the following op eratio n Q 3 = Q 1 ⊙ Q 2 = η 1 η 2 − q T 1 q 2 , η 1 q 2 + η 2 q 1 + S ( q 1 ) q 2 . (2) The set of unit-qua ternion Q forms a gro up with the quaternion m ultiplication op eratio n ⊙ , with the qua ter - nion inv er s e Q − 1 = ( η , − q ), and identit y element (1 , 0 ) = Q − 1 ⊙ Q = Q ⊙ Q − 1 . The unit-qua ternion is an ov e r-para meterization of the the sp ecial group of or- thogonal matrices of dimension three S O (3), defined a s S O (3 ) ≡ R ∈ R 3 × 3 , | R | = 1 , R T R = RR T = I , (3 ) that is, the tr ansformation from the quaternion s pace Q to S O (3), g iven by the following Ro drigues formula: R ( Q ) = I + 2 S ( q ) 2 − 2 η S ( q ) . (4) where S ( · ) is a skew-symmetric matrix given in the next section, is a tw o-to-o ne map, i.e., R ( Q ) = R ( − Q ). 2.2 Skew symmetric matric es and b ounde d functions Let x, y ∈ R 3 . W e define the skew-symmetric matrix S ( x ) suc h that S ( x ) y = x × y , wher e × deno tes the 2 vector cross pro duct. Several useful properties of this skew-symmetric matr ix are given b elow: S ( x ) 2 = xx T − x T xI 3 × 3 , (5) S ( Rx ) = RS ( x ) R T , R ∈ S O (3 ) , (6) S ( x ) y = − S ( y ) x = x × y , (7) λ S ( x ) 2 = h 0 , − k x k 2 , −k x k 2 i , (8) where λ ( M ) denotes the eigenv a lue s of the matrix M ∈ R 3 × 3 . Consider the b ounded, differentiable function, denoted as h ( · ) : R 3 → R 3 , which satisfies the following prop er- ties: u T h ( u ) > 0 ∀ u ∈ R 3 , k u k ∈ (0 , ∞ ) , 0 ≤ k h ( u ) k < 1 0 < k φ ( u ) k ≤ 1 ) ∀ u ∈ R 3 , k u k ∈ [0 , ∞ ) , (9) where φ ( u ) := ∂ ∂ u h ( u ). Thro ug hout the pap er we make use of one particular example giv en b y h ( u ) = 1 + u T u − 1 / 2 u . Using this definition for h ( · ) one c a n derive the ex pr ession φ ( u ) = (1 + u T u ) − 3 / 2 ( I 3 × 3 − S ( u ) 2 ) . . 3 P o sition Co n trol Using GPS and IMU Mea- surements Using the ab ove mathematical background, we will now pro ceed to for mulate the problem and define the pos i- tion control laws. A num b er of steps ar e taken which are group ed into v arious sections. In section 3.1 we define the sys tem mo del. In section 3.2 we formulate the pr ob- lem and state some necess ary a ssumptions. Section 3.3 provides an attitude e x traction a lg orithm which allows us to s pec ify a desir ed sy s tem attitude based up on the v alues o f the p osition and veloc ity error, and sectio n 3.4 defines a ttitude er ror functions. Finally , in section 3.5 we describ e the p osition control laws. 3.1 Equations of Motion T o mo del the system translationa l dynamics, we let p, v ∈ R 3 denote the p ositio n a nd velocity , res p ectively , of the vehicle COG expr essed in the inertial fra me I . F or this problem we assume that the bo dy-r eferenced angular v elo city v ector ω is av ailable a s a control input. W e cons ider the following VTOL UA V mo de l: ˙ p = v , (10) ˙ v = µ + δ, µ = g e 3 − u t R T e 3 , (11) ˙ Q = 1 2 " − q T η I 3 × 3 + S ( q ) # ω , (12) where u t = T /m b , T is the system thrust, m b is the sys- tem mass, e 3 = co l [0 , 0 , 1], g is the gravitational a ccel- eration, a nd δ is a dis tur bance which is dependent on aero dynamic drag forces. The control input of the s ys- tem is defined as u = [ u t , ω ] T . The system output is de- fined as y = [ p, v , b 1 , b 2 ] T where b 2 is the sig na l obtained using an accelero meter, b 1 = Rr 1 is a signal o btained using a ma gnetometer, a nd r 1 is the magnetic field of the surrounding en vironment (assumed consta nt). Note that the system attitude R (or Q ) is not assumed to b e a known output of the sys tem. W e co nsider a well-known mo de l for the a ccelerometer mo del (which includes force s due to linea r acceleratio n ˙ v ) which is given by b 2 = R ( ˙ v − g e 3 ) = − u t e 3 + Rδ = Rr 2 , (13) where r 2 is the inertial r eferenced system appare nt ac- celeration, which s atisfies ˙ v = g e 3 + r 2 , r 2 = − u t R T e 3 + δ. (14) In the development of attitude observers, it is often as- sumed that the system is nea r ho ver (or ˙ v ≈ 0) in or der to ass ume that the acceler ometer measur es the direc- tion of the gr avit y v ector. Also, in most situations the aero dynamic disturba nce vector δ is not included in the mo del. Howev er , for the VTOL UA V mo del, one ca n ea s - ily see that if the a ero dynamic disturbance is neg lected, or we assume tha t δ ≈ 0, then the acceler ometer sig - nal provides the measurement b 2 = − u t e 3 , which is the constant vector e 3 m ultiplied by the system thrust. In this case the use of the a ccelerometer seems trivial since its measurement is known a prior i and do es not co ntain any informatio n ab out the sy s tem attitude. Therefore, we see that for the VTOL UA V system, the as sumption that the a ccelerometer measur e s only the gravit y vector may be a dangerous assumption whic h may lea d to un- exp ected p erforma nce, even in the ca se where ˙ v ≈ 0. In fact, it seems that the utility of the acc e lerometer mea- surements is r elated to the measur ement of the vector δ since the a ccelerometer mea sures b 2 = − u t e 3 + Rδ . F or this rea son we b elieve that it is impor tant to include a mo del of the aero dyna mic disturba nces. 3.2 Pr oblem F ormulation Let p r denote a desired reference p ositio n, which is as- sumed to be constant (or slowly-v arying), and let e p = p − p r . Our main o b jective is to develop a control la w for the system inputs u t and ω , using the av a ilable system outputs y = [ p, v , b 1 , b 2 ], such that the system states e p and v a re b ounded a nd lim t →∞ e p ( t ) = lim t →∞ v ( t ) = 0 . F or the p ositio n control design we first require the fol- lowing assumptions a r e satisfied. 3 Assumption 1 Ther e exist p ositive c onstants c 1 and c 2 such that k r 2 ( t ) k ≤ c 1 and k ˙ r 2 ( t ) k ≤ c 2 . Assumption 2 Given two p ositive c onstants, γ 1 and γ 2 , ther e exists a p ositive c onstant c w ( γ 1 , γ 2 ) such t hat c w < λ min ( W ) wher e W = − γ 1 S ( r 1 ) 2 − γ 2 S ( r 2 ) 2 . The second assumption is satisfied if r 2 is non-v anishing and is no t collinear to the ma gnetic field vector r 1 . In the case where r 2 = 0, the sys tem velocity dynamics b e- come ˙ v = g e 3 (whic h corresp o nds to the r igid bo dy b e- ing in a free-fa ll state) which is not likely in normal cir- cumstances. When this assumption is satisfied, it follows that W is p ositive definite. F urthermo re, if this as sump- tion is satisfied, the v a lue of c w > 0 can b e arbitrar ily increased by increasing the v a lues of γ 1 and γ 2 . In additio n to this assumption, we also r e q uire some con- ditions on the a ero dynamic for ce vector δ . Assumption 3 (Aero dynamic F orces) In light of the fac t that the disturb anc e for c e δ is due to aer o dy- namic for c es exerte d on the vehic le we make the fol lowing simplifyi ng assumptions: (a) The aer o dynamic disturb anc e δ is dissip ative with r esp e ct to the system tr anslational kinetic ener gy and satisfies δ T v ≤ 0 . (b) The aer o dynamic distu rb anc e for c e δ is only dep en- dent on the system tr anslational velo city, and ther e exist a p ositive c onstant c 1 such that k δ k ≤ c 1 k v k 2 (c) Ther e exists p ositive c onstants c 2 and c 3 such that k ˙ δ k < c 2 + c 3 k v k 3 . Assumption 3(a) a nd 3(b) can b e realized when the s ys- tem is op erating in an environment where the ex ogenous airflow is negligible (no wind). Ass umption 3(c) can b e satisfied when the system geometry is sufficiently sym- metrical such that the system aero dynamic forces do not sig nificantly dep end on the sy stem or ientation. Al- though this assumption may b e rea sonable for certain VTOL t ype aircraft, for example the ducted-fan, this as- sumption may not be the case with cer ta in systems, for example fixed wing aircra ft, w he r e the sy stem aer o dy- namics depend largely on the orientation of the vehicle. Now that we hav e es tablished the requir ed assumptions, let us consider the model for the system acceleration from (11). Due to the underactuated nature of this sys - tem, the transla tional a c c eleration is driven by the sys- tem thrust and orientation µ ( u t , R ). Tha t is, if µ was a control input, setting µ = − k p e p − k v v w ould sa tisfy the ob jectives (since v T δ ≤ 0 ). How ever, s ince µ is a func- tion of the system state, we define µ d ∈ R 3 as the desir e d ac c eler ation , and intro duce the new e rror signal ˜ µ = µ − µ d . (15) Subsequently , a new ob jective is to force ˜ µ → 0 in order to obtain the desir ed transla tional dynamics. Since the signal µ is dependent o n the system thrust a nd attitude, based up on the v alue of the desired acceleratio n µ d we wish to o bta in a suitable desir e d attitude , denoted as Q d = ( η d , q d ) ∈ Q , a nd system thrust u t , such that the following equation is satisfied µ d = g e 3 − u t R T d e 3 , (16) where R d = R ( Q d ) is the rotation matrix corresp onding to the unit-quater nion Q d , as defined by (4 ). An extr ac- tion metho d satisfying these requir e ments, whic h has bee n previo usly given in (Rob er ts and T ayebi, 2011a), is describ ed in the fo llowing section. 3.3 Desir e d Attitude and Thrust Extr action In this sec tio n, given a v alue of the desir ed accele r ation µ d , we seek to o btain the v alue o f the desired orientation R d (or equiv alently in terms of the unit-quaternion Q d ) such that equation (16) is satisfied. T o so lve this problem we us e an attitude a nd thrust ex traction algorithm which has been previously prop o s ed by (Rob erts and T ay ebi, 2011a ): Given µ d where µ d / ∈ L , L = { µ d ∈ R 3 ; µ d = col[0 , 0 , µ d 3 ]; µ d 3 ∈ [ g , ∞ ) } , (17) then, one so lution for the thrust u t and attitude Q d = ( η d , q d ) wher e R d = R ( Q d ), which satisfies (16) is g iven by u t = k µ d − g e 3 k , (18) η d = 1 2 1 + g − e T 3 µ d k µ d − g e 3 k 1 / 2 , (19) q d = 1 2 k µ d − g e 3 k η d S ( µ d ) e 3 . (20) The extracted a ttitude Q d has the time-deriv ative ˙ Q d = 1 2 " − q T d η d I 3 × 3 + S ( q d ) # ω d , (21) where the desir e d angular velo city ω d is given b y ω d = M ( µ d ) ˙ µ d , (22) M ( µ d ) = 1 4 η 2 d u 4 t − 4 S ( µ d ) e 3 e T 3 + 4 η 2 d u t S ( e 3 ) + 2 S ( µ d ) − 2 e T 3 µ d S ( e 3 ) S ( µ d − g e 3 ) 2 . (23) 3.4 Attitude Err or T o repres e n t the relative o rientation of the desired at- titude Q d with res p ect to the actual attitude Q , w e let 4 ˜ Q = ( ˜ η , ˜ q ) ∈ Q and ˜ R = R ( ˜ Q ) ∈ S O (3) denote the un- known attitu de err or which is defined by ˜ Q = Q ⊙ Q − 1 d , ˜ R = R ( ˜ Q ) = R T d R, (24) where Q d is the unit quaternion o bta ined using (19) a nd (20). In lig h t o f ˙ Q and ˙ Q d , a s defined by (12) and (21), resp ectively , the time deriv a tive of the a ttitude error is found to b e ˙ ˜ Q = 1 2 " − ˜ q T ˜ η I + S ( ˜ q ) # ˜ ω , ˙ ˜ R = − S ( ˜ ω ) ˜ R, (25) ˜ ω = R T d ( ω − ω d ) , (26) where ω d is the desi r e d angular velo city as defined by (22). One of the ob jectives of the control desig n is to force the system o rientation to the desired attitude, or in terms of the rotatio n matrices, to for ce R → R d (and therefore µ → µ d ), in order to obtain the desired transla- tional dyna mics. As mentioned in section 2.1, this c orre- sp onds to tw o p oss ible solutions for the unit-quaternion which are given b y ˜ Q = ( ± 1 , 0 ). The m ultiplicit y o f equi- librium solutions is ma nageable since our ob jectives are satisfied for b oth v alues of the unit-quaternio n. 3.5 Position Contr ol ler The p ositio n controller design is based up on a v alue o f the desir e d system transla tio nal acceler ation, which is sp ecified by the virtual control law µ d . Using the ca lcu- lated v alues for the po sition err o r e p = p − p r , and the system velo city v , the v a lue of the desired accelera tion is obtained. This desired acceler ation is directly related to a corresp onding desired rigid-bo dy orientation and thrust, denoted by Q d and u t , resp ectively , which is ob- tained using the attitude and thrust extraction metho d describ ed in se ction 3.3. The desired attitude given in the S O (3 ) parametriz a tion, denoted as R d , is subsequently obtained using Q d with (4). Since the system attitude is not known, we incorp or ate the use o f a sp ecial filter which is driven by the v a lue of the linear velocity v . W e let ˆ v ∈ R 3 denote the filter state v ar iable which c o r- resp onds to the system velocity v , and define the e rror function ˜ v = v − ˆ v . Although the system linear velo city is k nown, the use of the sig nal ˆ v throug h the err or function ˜ v , for a n a p- propriate choice o f the e s timation law ˙ ˆ v can can b e viewed a s a function of the s ystem acceler ation in terms of the unknown signal r 2 . Since this vector is known in the b o dy fixed frame (measur ed using a n a ccelerometer , b 2 = Rr 2 ), the filter v ariable ˆ v through the error func- tion ˜ v can b e used with the acceler ometer to provide information r e la ted to the system attitude. After these steps, the re ma ining control desig n is fo cused on forcing the actual system attitude to the desired a ttitude using the control input ω . The pr op osed control law is given as follows: ω = M ( µ d ) f µ d − k v φ ( v ) R T d ( b 2 + u t e 3 ) + ψ , (27) f µ d = − k p φ ( e p ) v + k v φ ( v ) ( k p h ( e p ) + k v h ( v )) , (28) ψ = γ 1 S ( R d r 1 ) b 1 + γ 2 k 1 S ( R d ( v − ˆ v )) b 2 , (29) ˙ ˆ v = g e 3 + R T d b 2 + k 1 ( v − ˆ v ) + 1 k 1 R T d S ( b 2 ) ψ , (30) µ d = − k p h ( e p ) − k v h ( v ) , (31) where k 1 , γ 1 , γ 2 > 0, M ( µ d ) is the function defined by (23), φ ( · ) is the b ounded function defined in section 2.2, u t = k µ d − g e 3 k , R d = R ( Q d ) and Q d = ( η d , q d ) is ob- tained from the v alue of µ d using the attitude extra ction algorithm defined in section 3.3. Theorem 1 Consider t he system given by (10)-(12), wher e we apply the c ont r ol laws u t = k µ d − g e 3 k and ω as define d by (27), wher e k p > 0 and k v > 0 ar e chosen su ch that k p + k v < g . L et assumptions 2 and 3 b e satisfie d. Then the system thrust u t is b ounde d and n on- vanishing such that 0 < c t ≤ u t ( t ) ≤ ¯ c t , c t = g − k p − k v , ¯ c t = g + k p + k v , (32) and for al l initial c onditions ˜ η ( t 0 ) 6 = 0 (or e quivalently k ˜ q ( t 0 ) k 6 = 1 ), ther e exists p ositive c onstant s ¯ γ 1 , ¯ γ 2 , κ 1 > 0 such that for γ 1 > ¯ γ 1 , γ 2 > ¯ γ 2 , k 1 > κ 1 , the system states e p and v ar e b ounde d and lim t →∞ e p ( t ) = lim t →∞ v ( t ) = 0 . Pro of: W e be g in b y first pr oving the upper and lower bo unds o n the thrust control input u t . Since the function h ( · ) is b o unded by unity , the norm of the virtua l cont rol law µ d is b ounded b y k µ d k < k p + k v . Since the thrust control input is given b y u t = k µ d − g e 3 k , and k p and k v are chosen s uch that k p + k v < g , o ne ea sily arr ives at the low er and upper b ounds for u t describ ed in the theorem. A nice c o nsequence of the b oundedness o f u t , is that the function M ( µ d ) defined b y (23 ), which is us ed in the expr ession for the desired angular velo cit y ω d , is also b ounded. In fact, in (Rob erts and T ayebi, 2011 a) the authors s how that the norm of this matrix satisfies k M ( µ d ) k ≤ √ 2 /c t . (33) W e now fo cus our attention on the dynamics of the po - sition er ror e p = p − p r and the sy s tem velocity v . Let ˜ µ = µ − µ d , where µ is the function defined by (11). In light of the choice for µ d , the deriv atives o f the p osition error and veloc it y can b e written as ˙ e p = v , ˙ v = − k p h ( e p ) − k v h ( v ) + ˜ µ + δ. (34) As previously men tio ned, the velo city observer erro r ˜ v = v − ˆ v is consider ed as a function of the apparent acce le r- 5 ation vector r 2 . In fact, w e define an err or function asso - ciated to the appar ent acceleration r 2 which is given b y ˜ r 2 = k 1 ˜ v − ( I − ˜ R ) r 2 . (35) Another imp ortant erro r function which w e will fo c us on is the a ttitude error function ˜ R , or equiv alently ˜ Q = ( ˜ η , ˜ q ), whic h defines the relative orientation betw een the actual system attitude and the de s ired attitude. T o prove the theorem, we will cons truct a L yapunov function in terms of the erro r functions ˜ q , ˜ r 2 , v and e p , in o rder to show that all of these states tend to zero. Since the dynamics o f ˜ q (or equiv alently ˜ η ), and ˜ r 2 are s ome- what complicated, w e will be gin by first simplifying the expressions for their deriv atives. In order to a nalyze the dyna mics of the attitude er ror, it is sufficient to study the der iv ative of the quaternion- scalar ˜ η . T his is also desir ed since the deriv ative of the quaternion scalar can b e less complicated than the deriv ative of the quaternion v ector. As a star ting p oint, the deriv ative of ˜ η can b e found from (25) to be ˙ ˜ η = − ˜ q T ˜ ω / 2 wher e ˜ ω = R T d ( ω − ω d ) and ω d = M ( µ d ) ˙ µ d . T o find a r esult for the des ired ang ular veloc it y ω d we firs t us e the results (34), in a ddition to the deriv a tive of the b ounded func- tion h ( · ), deno ted as φ ( · ) as defined in section (2.2), to differentiate the virtual co nt rol law µ d to obtain ˙ µ d = − k p φ ( e p ) v − k v φ ( v ) ( − k p h ( e p ) − k v h ( v ) + ˜ µ + δ ) . Sim- plifying this result, we obtain the following ex pression for the desire d angular velo cit y ω d = M ( µ d ) ( f µ d − k v φ ( v ) δ − k v φ ( v ) ˜ µ ) . (36) Recall the control input ω uses the function ψ , given by (29). Using (35), the prop er t y (6) and the fact S ( ˜ Rr 2 ) ˜ Rr 2 = 0, ψ can b e rewritten as ψ = R d γ 1 S ( r 1 ) ˜ Rr 1 + γ 2 S ( r 2 ) ˜ Rr 2 + γ 2 S ( ˜ r 2 ) ˜ Rr 2 . (3 7) Finally , us ing the expression for the control input ω , the erro r function ˜ r 2 , in a ddition to (36 ), (3 7) and the fact b 2 + u t e 3 = Rδ , we find the deriv a- tive ˙ ˜ η = − 1 2 ˜ q T R T d γ 1 R d S ( r 1 ) ˜ Rr 1 + γ 2 R d S ( r 2 ) ˜ Rr 2 + γ 2 R d S ( ˜ r 2 ) ˜ Rr 2 + k v M ( µ d ) φ ( v )( I − ˜ R ) δ + k v M ( µ d ) φ ( v ) ˜ µ . T o further s implify this result, we first r e cognize that in light of the definition of the rotation matrix from (4) and the pro p erty S ( u ) u = 0, one can find ˜ q T S ( r i ) ˜ Rr i = 2 ˜ q T S ( r i ) ˜ q ˜ q T − ˜ η S ( ˜ q ) r i = 2 ˜ η ˜ q T S ( r i ) 2 ˜ q . Ther efore, using the expression for the matrix W defined b y as- sumption 2, we obtain ˙ ˜ η = ˜ η ˜ q T W ˜ q − γ 2 2 ˜ q T S ( ˜ r 2 ) ˜ Rr 2 − k v 2 ˜ q T R T d M ( µ d ) φ ( v ) ( I − ˜ R ) δ + ˜ µ . ( 38) Note that due to assumption 2 , the matr ix W is p ositive- definite. W e now shift our fo cus to study the dynamics of the error function ˜ r 2 . In lig ht of the expr ession for ˙ v from (14), the expression for ˙ ˆ v from (30), the attitude error dynamics from (25)-(26), the expressions (27), (36), a nd using the fact tha t − k 1 ˜ v + r 2 − ˆ R T b 2 = − ˜ r 2 , we obtain ˙ ˜ r 2 = − k 1 ˜ r 2 − ( I − ˜ R ) ˙ r 2 + k v R T d S ( b 2 ) M ( µ d ) φ ( v )(( I − ˜ R ) δ + ˜ µ ) . (39) A commonality b etw een the dynamic equations for ˙ ˜ η and ˙ ˜ r 2 , is that they both depend on the erro r functions ( I − ˜ R ) and ˜ µ . These tw o e r ror functions can both b e expres sed in ter ms of the attitude error us ing the quaternion vec- tor part ˜ q , which will b e a useful characteristic later in the Lyapuno v analys is. T o describ e this r elationship we define tw o functions, f 1 ( u t , ˜ η , ˜ q ) , f 2 ( x, ˜ η , ˜ q ) ∈ R 3 × 3 such that ˜ µ = f 1 ( u t , ˜ η , ˜ q ) ˜ q , ( I − ˜ R ) x = f 2 ( x, ˜ η , ˜ q ) ˜ q , (40) where x ∈ R 3 . Using the definition o f ˜ µ = µ − µ d , in addition to the express ions for µ a nd µ d from (1 1) and (1 6), resp ectively , one can find f 1 ( u t , ˜ η , ˜ q ) = 2 u t ( ˜ η I − S ( ˜ q )) S ( R T e 3 ) and f 2 ( x, ˜ η , ˜ q ) = 2( S ( ˜ q ) − ˜ η I ) S ( x ). Based upon these definitions and the fact that k ˜ ηI − S ( ˜ q ) k = 1, w e find the following uppe r b ounds for these t wo functions k f 1 ( u t , ˜ η , ˜ q ) k ≤ 2 ¯ c t , k f 2 ( x, ˜ η , ˜ q ) k ≤ 2 k x k , (41) W e now prop ose the following Lyapuno v function can- didate: V = γ k p q 1 + e T p e p − 1 + γ 2 v T v + γ k r 2 ˜ r T 2 ˜ r 2 + γ q 1 − ˜ η 2 , (42) where γ , γ q , k p and k r are po sitive constants. In lig ht of (34), (38), (39 ), w e have ˙ V = − γ k v v T h ( v ) + γ v T δ − γ k r k 1 ˜ r T 2 ˜ r 2 − 2 γ q ˜ η 2 ˜ q T W ˜ q + γ k v k r ˜ r T 2 R T d S ( b 2 ) M ( µ d ) φ ( v ) f 1 ( u t , ˜ η , ˜ q ) + f 2 ( δ, ˜ η , ˜ q ) ˜ q − γ k r ˜ r T 2 f 2 ( ˙ r 2 , ˜ η , ˜ q ) ˜ q + γ v T f 1 ( u t , ˜ η , ˜ q ) ˜ q + γ q k v ˜ η ˜ q T R T d M ( µ d ) φ ( v ) ( f 1 ( u t , ˜ η , ˜ q ) + f 2 ( δ, ˜ η , ˜ q )) ˜ q + γ 2 γ q ˜ η ˜ q T S ( ˜ r 2 ) ˜ Rr 2 . (43) Now, we wish to show that for an appr o priate choice of the control gains, ˙ V is guar anteed to b e non-pos itive. How ever, this ob jective is a bit involv ed, and there fore requires we study the b o und of several functions used in the expressio n o f ˙ V . W e b egin this analys is by defining the function sca lar function σ ( t ) := p 2 V ( t ). Based up on the definition o f V from (42), the sta tes v and ˜ r 2 are bo unded by σ a s follows k v ( t ) k ≤ σ ( t ) / √ γ , k ˜ r 2 ( t ) k ≤ σ ( t ) / √ γ k r . Therefore, in light o f assumption 3(b), one can conclude that k δ ( v ) k ≤ c 1 σ ( t ) 2 /γ . (44) 6 Due to the b ounds of the functions f 1 ( u t , ˜ η , ˜ q ) a nd f 2 ( δ, ˜ η , ˜ q ) from (41), and the definition of r 2 from (14 ) we also find k f 1 ( u t , ˜ η , ˜ q ) + f 2 ( δ, ˜ η , ˜ q ) k ≤ 2 γ ¯ c t + c 1 σ ( t ) 2 /γ (4 5) k b 2 k ≤ γ ¯ c t + c 1 σ ( t ) 2 /γ . (46) Given these bounds , w e no w apply Y oung’s ineq uality to a num ber of the undesired terms in the expressio n for ˙ V : γ v T f 1 ( u t , ˜ η , ˜ q ) ˜ q ≤ γ 1 2 ǫ 1 √ 1 + v T v v T v + 1 2 √ 1 + v T v ǫ 1 ! 4 ¯ c 2 t ˜ q T ˜ q ! ≤ γ ǫ 1 2 v T h ( v ) + 2 √ γ ¯ c 2 t ǫ 1 p γ + σ ( t ) 2 ˜ q T ˜ q , (47) γ k v k r ˜ r T 2 R T d S ( b 2 ) M ( µ d ) φ ( v ) ( f 1 ( u t , ˜ η , ˜ q ) + f 2 ( δ, ˜ η , ˜ q )) ˜ q ≤ γ k v k r ǫ 2 2 ˜ r T 2 ˜ r 2 + γ k v k r 2 ǫ 2 2 c 2 t 4 γ ¯ c t + c 1 σ ( t ) 2 4 γ 4 ! ˜ q T ˜ q ≤ γ k v k r ǫ 2 2 ˜ r T 2 ˜ r 2 + 4 k v k r ǫ 2 γ 3 c 2 t γ ¯ c t + c 1 σ ( t ) 2 4 ˜ q T ˜ q , (48) where the nor m of M ( µ d ) is g iven b y (33). T o determine the b ound of the term inv olv ing the time-deriv ative o f r 2 , we first derive the expres sion for ˙ r 2 to b e ˙ r 2 = − ˙ u t R T e 3 + u t R T S ( e 3 ) ω + ˙ δ = − 1 u t ( µ d − g e 3 ) T − k p φ ( e v ) v − k v φ ( v ) f 1 ( u t , ˜ η , ˜ q ) ˜ q + k v φ ( v ) ( k p h ( e p ) + k v h ( v )) − k v φ ( v ) δ R T e 3 + u t R T S ( e 3 ) M ( µ d ) − k p φ ( e v ) v − k v φ ( v ) ˜ Rδ + k v φ ( v ) ( k p h ( e p ) + k v h ( v )) + γ 1 S ( R d r 1 ) b 1 + γ 2 R d S ( ˜ r 2 ) ˜ Rr 2 + γ 2 R d S ( r 2 ) ˜ Rr 2 + ˙ δ . (49) Due to the bo unds of the functions h ( · ), φ ( · ), the (upper and low e r ) b ounds of the thrust co ntrol input u t , the bo und o f ˙ δ from as sumption 3 (c), the b ound of b 2 from (46) (same as the b ound of r 2 ), and the b ound of δ from (44), we find that there exists five positive constants d i > 0, such that the norm of ˙ r 2 is b ounded by ˙ r 2 ≤ d 1 + d 2 k v k + d 3 k v k 2 + d 4 k v k 3 + d 5 k v k 4 . Ho wev er , for the sake of simplicity , fro m this r esult we fur ther conclude that there exists p ositive constants c 3 and c 4 such that ˙ r 2 ≤ c 3 + c 4 σ ( t ) 4 . As a res ult of this analy sis, we ag ain use Y oung’s inequalit y to establish the following b ounds: γ k r ˜ r T 2 f 2 ( ˙ r 2 , ˜ η , ˜ q ) ˜ q ≤ γ k r ǫ 3 2 ˜ r T 2 ˜ r 2 + 2 γ k r ǫ 3 c 3 + c 4 σ ( t ) 4 2 ˜ q T ˜ q , (50) γ 2 γ q ˜ η ˜ q T S ( ˜ r 2 ) ˜ Rr 2 ≤ γ 2 2 γ q ǫ 4 2 ˜ r T 2 ˜ r 2 + γ q 2 γ 2 ǫ 4 ¯ c t γ + c 1 σ ( t ) 2 2 ˜ η 2 ˜ q T ˜ q , (51) γ q k v ˜ η ˜ q T R T d M ( µ d ) φ ( v ) ( f 1 ( u t , ˜ η , ˜ q ) + f 2 ( δ, ˜ η , ˜ q )) ˜ q ≤ γ q k v √ 2 c t ! 2 γ ¯ c t + c 1 σ ( t ) 2 γ ! | ˜ η | ˜ q T ˜ q ≤ 2 √ 2 γ q k v γ ¯ c t + c 1 σ ( t ) 2 γ c t | ˜ η | ˜ q T ˜ q , (52) Recall from assumption 2 tha t the norm of the matrix W has a low er b ound whic h is deno ted a s c w . Therefore, in light of the lower bounds defined a b ov e, and ass umption 3(a) we find the express io n ˙ V is b ounded by ˙ V ( t ) ≤ − γ v T h ( v ) ( k v − ǫ 1 / 2) − γ k r ˜ r T 2 ˜ r 2 k 1 − ǫ 2 k v + ǫ 3 2 − ǫ 4 γ 2 2 γ q 2 γ k r − γ q ˜ η 2 ˜ q T ˜ q 2 c w − 1 ˜ η 2 α 1 ( t ) ǫ 1 + α 2 ( t ) ǫ 2 + α 3 ( t ) ǫ 3 − α 4 ( t ) ǫ 4 − 2 √ γ ¯ c 2 t γ + σ ( t ) 2 1 / 2 ˜ η 2 − 2 √ 2 k v γ ¯ c t + c 1 σ ( t ) 2 γ c t | ˜ η | , (53) α 1 ( t ) = 2 √ γ ¯ c 2 t p γ + σ ( t ) 2 /γ q , (54) α 2 ( t ) = 4 k v k r γ ¯ c t + c 1 σ ( t ) 2 4 / ( γ 3 c 2 t γ q ) , (55) α 3 ( t ) = 2 γ k r c 3 + c 4 σ ( t ) 4 2 /γ q , (56) α 4 ( t ) = ¯ c t γ + c 1 σ ( t ) 2 2 / (2 γ 2 ) . (57) Now, let us define a low er b ound for | ˜ η | , which based upo n so me appr opriate choices of g ains, ensures ˙ V ≤ 0 for all t ≥ t 0 . Note that when ˜ η ( t ) = 0 we cannot guar - antee stability using (53) since in this case ˙ V could po - ten tially b e po sitive. T o show that ˜ η ( t ) is nev er zero , we first introduce the p ositive constant ρ which is the desired lower b ound for | ˜ η ( t ) | . The r efore, ρ must b e chosen to satisfy 0 < ρ < | ˜ η ( t 0 ) | . Subsequently , based upo n the definition o f the Lyapunov function candi- date (42), we choose γ = ¯ γ ( k p ( p 1 + k e p ( t 0 ) k 2 − 1) + k v ( t 0 ) k 2 / 2 + k ˜ r 2 ( t 0 ) k 2 / 2 + ξ ) − 1 , , where the parameter ξ is chosen to be p ositive, and ¯ γ is chosen to satisfy 0 < ¯ γ < γ q ˜ η ( t 0 ) 2 − ρ 2 , where γ q is chosen to b e po s - itive. Recall k p > 0 and k v > 0 are chosen arbitra rily provided that k p + k v < g . The r emaining gains and pa- rameters are chosen to ensure tha t all ter ms in (53 ) are guaranteed to be negative at the initial time t 0 . The gains and parameter s are chosen as fo llows: Cho ose ǫ 1 such that 0 < ǫ 1 < 2 k v . Reca ll that the minimum eigenv a lue of W , deno ted by c w > 0, can be inc r eased using the gains γ 1 and γ 2 . Therefore, ther e ex ists consta nts ¯ γ 1 , ¯ γ 2 , and ¯ ǫ i , i = 2 , 3 , 4 , such that for all γ 1 > ¯ γ 1 , γ 2 > ¯ γ 2 , and 7 ǫ i > ¯ ǫ i , the following inequality is satisfied 2 c w > 1 ρ 2 α 1 ( t 0 ) ǫ 1 + α 2 ( t 0 ) ǫ 2 + α 3 ( t 0 ) ǫ 3 + α 4 ( t 0 ) ǫ 4 + 2 √ γ ¯ c 2 t γ + σ ( t 0 ) 2 1 / 2 ρ 2 + 2 √ 2 k v γ ¯ c t + c 1 σ ( t 0 ) 2 γ c t ρ . (58) Finally , choo sing k 1 > κ 1 ( ǫ 2 , ǫ 3 , ǫ 4 , γ ) := ( ǫ 2 k v + ǫ 3 ) / 2 + ( ǫ 4 γ 2 2 γ q ) / (2 γ k r ) we conclude that ˙ V ( t 0 ) ≤ 0 at the ini- tial time t 0 . W e now need to show that this is true for all time. Since the functions α 1 ( t ) through α 4 ( t ) a r e non-increas ing if ˙ V ≤ 0, then a sufficient condition for ˙ V ( t ) ≤ 0 is | ˜ η ( t ) | ≥ ρ . W e will now show that indeed ρ ≤ | ˜ η ( t ) | for all t > t 0 . Supp ose that there e x ists a time t 1 such that for all t 0 ≤ t < t 1 , | ˜ η ( t ) | ≥ ρ and | ˜ η ( t 1 ) | < ρ when t = t 1 . At the time t 1 from (42), it is clear that V ( t 1 ) ≥ γ q 1 − ˜ η ( t 1 ) 2 > γ q 1 − ρ 2 . How ever, due to the choice of γ and ¯ γ the v a lue of the Lyapuno v function candidate at the initial time t 0 m ust satisfy V ( t 0 ) < ¯ γ + γ q 1 − ˜ η ( t 0 ) 2 < γ q 1 − ρ 2 and therefor e V ( t 1 ) > V ( t 0 ). This is a contradiction since ˙ V ( t ) ≤ 0 fo r all t 0 ≤ t < t 1 , a nd the functions V ( t ), α i ( t ) and σ ( t ) are non-incr easing in the in terv al t 0 ≤ t < t 1 . Therefore, we conclude that | ˜ η ( t ) | ≥ ρ and ˙ V ( t ) ≤ 0 for all t > t 0 , and the states v and ˜ r 2 are b ounded. Therefore , ˙ ˜ r 2 , ˙ v , ˙ ˜ η , and ¨ V ar e b ounded. Inv o king Bar balat’s Le mma , o ne can conclude that lim t →∞ ( v ( t ) , ˜ r 2 ( t ) , ˜ q ( t )) = 0. F ur- thermore, since lim t →∞ ˙ v ( t ) = 0, and lim t →∞ δ ( t ) = 0, it follows from the expression of the velocity dynamics ˙ v = − k p h ( e p ) − k v h ( v ) − δ = 0, that lim t →∞ e p ( t ) = 0, which ends the pro o f. 4 Simulations Sim ulation results hav e b e e n provided for the system de- fined by (10)-(12) with the pr op osed control laws (2 7 )- (31), which a re shown in Figure (1). T o demo ns trate the robustness of the prop os ed co nt rol s trategy , we hav e in- cluded in our s im ulations the presence of wind, sensor noise and gyr o-bias. A muc h more aggressive aer o dy- namic mo del is adopted during the sim ulations, whic h violates the assumptions in order to demonstrate the ro - bustness of the prop osed cont roller . This aero dyna mic mo del considers that the aero dynamic dra g of the system is a function of the system attitude, and a ls o consider s that the s ystem is o pe rating in the presence of unifor m wind. The following mo del w as used for the aer o dynamic disturbance δ : δ = − 1 m b k v − v w k R T C d R ( v − v w ) where v w ∈ R 3 is the iner tial r eferenced wind velocity vector, m b is the sys tem mass and C d = C T d > 0 is a consta nt po sitive definite matrix that re pr esents bo dy-referenced aero dynamic drag co e fficient s that a re dep endent on the system geometry . Note that the expression for δ dep ends on the mass m b of the system due to the definitio n of the velocity dyna mics fr o m (11). A co nstant wind ve- lo city vector w as specified a s v w = [1 0 , 5 , 0] m/ s . F o r 0 20 40 60 80 100 120 −40 −20 0 20 40 60 80 100 120 140 160 t ( s ) e p ( m ) x y z Fig. 1. Position Error e p ( m ) 0 20 40 60 80 100 120 −6 −5 −4 −3 −2 −1 0 1 2 3 4 t ( s ) v ( m/s ) x y z Fig. 2. V elo city v ( m/s ) this s imulation the v a lue C d = diag [0 . 1 , 0 . 1 , 0 . 05] k g /m was c hosen and the system mass was sp ecified as m b = 5 k g . Gaussia n noise w a s added to the magnetometer, accelerometer , gyroscop e, linear velocity a nd p o sition sensors with standard deviation v alues equal to 0 . 01 G , 0 . 1 m/s 2 , 0 . 1 deg /s , 0 . 5 m/s and 0 . 5 m , res p ectively . A bias w a s als o added to the gyro measur ement s which was chosen as [0 . 1 , 0 . 05 , − 0 . 2] de g /s . The system gains were chosen as follows: k p = 5, k v = 0 . 1, γ 1 = 0 . 1 = γ 2 = 0 . 05 and k 1 = 5. The following initial conditions were use d: p ( t 0 ) = [150 , 50 , 0 ] m , v ( t 0 ) = [0 , 0 , 0] m/s , ˆ v ( t 0 ) = [0 , 0 , 0], Q ( t 0 ) = [1 , 0 , 0 , 0] , a nd the desire d po - sition was chosen as p r = [0 , 0 , 0]. The ine r tial vec- tor for the magnetometer mea surement was chosen as r 1 = [0 . 18 , 0 , 0 . 5 4 ] G , which is co ns istent with the magni- tude and direction of the E arths magnetic field in So uth- ern Ontario, Canada. The s imulation results show that the system p osition conv erges to the desire d v a lue , ex- cept for a small erro r attributed to the sensor noise, gy- roscop e bias and the effect of the aer o dynamic distur- bance caused by wind. 5 Conclusion A new p ositio n controller for VTOL-UA Vs tha t do es not require direct measur ement of the s ystem’s attitude, nor do es it r e quire the use o f a n a ttitude observer has b een prop osed. T he acceler ometer and mag netometer sig nals are explicitly use d in the control law to ca pture the nec- essary infor ma tion a bo ut the system’s orientation (with- 8 0 20 40 60 80 100 120 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 t ( s ) ω ( ra d/s ) x y z Fig. 3. Control Effort (A ngular V elo city) ω 0 20 40 60 80 100 120 0 10 20 30 40 50 60 70 t ( s ) T ( N ) Fig. 4. Control Effort (Thrust) T = u t · m b ( N ) out, ex plicitly , reconstructing or estimating the orienta- tion). F urthermore, the us ual s implifying assumption r e- stricting the acceler ometer mea s urement to the gr avit y direction is not required anymore. In fact, in this work, the accelerometer is used to mea s ure the system’s appar- ent accelera tion, which makes the prop osed control effi- cient when the s ystem is sub jected to significa n t linear acceleratio ns. W e hav e shown that, thro ugh an appro- priate c hoice o f the control ga ins , the system pos ition is guaranteed to be b ounded and to converge to the desired po sition for almost a ll initial conditions. Simulation re- sults have also b een p erformed which demo nstrate the effectiveness o f the controller, despite the choice o f rela- tively low con trol gains , and larg e initia l conditions. Ac knowledgemen ts This work was supp or ted by the Nationa l Sciences a nd Engineering Resear ch Council of Canada (NSER C) References Abdess ameud, A. and T ayebi, A. (201 0 ). Global tra jec- tory tra cking control of VTO L -UA Vs without linear velocity measurements. A utomatic a , 46(6 ):1053– 1059. Aguiar, a. P . and Hespa nha, J. A. P . (200 7). T ra jector y- T racking and Path-F ollowing o f Underactuated Au- tonomous V ehicles With Parametric Mo deling Un- certaint y . IEEE T r ansactions on Automatic Con- tr ol , 5 2(8):1362 –137 9. Bonnab el, S., Ma rtin, P ., and Rouchon, P . (200 8). Symmetry-Pre s erving Obs ervers. IEEE T ra nsac- tions on Automatic Contr ol , 53(11):25 14–25 26. F razzo li, E., Dahleh, M., and F er on, E. (200 0 ). T r a jec- tory tracking control design for a utonomous heli- copters using a backstepping algor ithm. In Amer- ic an Contr ol Confer enc e, 2000. Pr o c e e dings of the 2000 , volume 6, pages 410 2–41 0 7. IE EE. Hauser, J., Sastry , S., a nd Meyer, G. (19 92). N onlinear control design for slightly non-minimum phase sys- tems: Applications to v/sto l air craft. Automatic a , 28(4):665 –679 . Hua, M.-D. (2010). A ttitude estimation for accelerated vehicles using GPS/INS measurements. Contr ol Engine ering Pr actic e , 18 (7):723– 7 32. Hua, M.-D., Hamel, T., Mor in, P ., and Sa mson, C. (2009). A Control Appro ach for Thrust-P rop elled Underactuated V e hic le s a nd its Application to VTOL Drones. IEEE T r ansactions on Automatic Contr ol , 54 (8):1837 – 1853 . Mahony , R., Hamel, T., and Pflimlin, J. (20 08). Nonlin- ear Complementary Filters on the Sp ecia l Orthogo - nal Gr oup. IEEE T r ansactions on A utomatic Con- tr ol , 5 3(5):1203 –121 8. Martin, P . and Sa la ¨ un, E. (200 8). An inv ariant observer for earth-velocity-aided attitude he a ding r eference systems. In IF AC World Congr ess , pa ges 9 857– 9864. Martin, P . a nd Sala ¨ un, E. (20 10). Design and im- plement ation o f a low-cost obser ver-based a ttitude and heading refer ence system. Contr ol Engine ering Pr actic e , 1 8(7):712– 722. Pflimlin, J . M., Souere s , P ., and Hamel, T. (2007 ). Po- sition control of a ducted fan VTOL UA V in cross- wind. In ternational Journ al of Contr ol , 80(5):666 – 683. Rob erts, A. and T ayebi, A. (20 11a). Adaptive po sition tracking of VTOL UA Vs. IEEE T r ansactions on R ob otics , 27(1):129 –142 . Rob erts, A. and T ayebi, A. (2011 b). Position Co ntrol of VTOL UA Vs Using Iner tial V ector Meas urments. In A c c epte d as re gular p ap er for pr esentation a the 18th World Congr ess of the International F e der ation of A utomatic Contr ol (IF A C), Milano, Italy, Aug. 28 - Sept. 2, . 9
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment