Local Routing in Graphs Embedded on Surfaces of Arbitrary Genus
We present a local routing algorithm which guarantees delivery in all connected graphs embedded on a known surface of genus $g$. The algorithm transports $O(g\log n)$ memory and finishes in time $O(g^2n^2)$, where $n$ is the size of the graph. It requires access to a homology basis for the surface. This algorithm, GFR, may be viewed as a suitable generalization of Face Routing (FR), the well-known algorithm for plane graphs, which we previously showed does {\it not} guarantee delivery in graphs embedded on positive genus surfaces. The problem for such surfaces is the potential presence of homologically non-trivial closed walks which may be traversed by the right-hand rule. We use an interesting mathematical property of homology bases (proven in Lemma \ref{lem:connectFaceBdr}) to show that such walks will not impede GFR. FR is at the base of most routing algorithms used in modern (2D) ad hoc networks: these algorithms all involve additional local techniques to deal with edge-crossings so FR may be applied. GFR should be viewed in the same light, as a base algorithm which could for example be tailored to sensor networks on surfaces in 3D. Currently there are no known efficient local, logarithmic memory algorithms for 3D ad hoc networks. From a theoretical point of view our work suggests that the efficiency advantages from which FR benefits are related to the codimension one nature of an embedded graph in a surface rather than the flatness of that surface (planarity).
💡 Research Summary
The paper introduces Generalized Face Routing (GFR), a local routing algorithm that guarantees packet delivery on any connected graph embedded in a known surface of arbitrary genus (g). Traditional Face Routing (FR) works flawlessly on planar graphs by following the right‑hand rule around faces, but on surfaces with positive genus (e.g., a torus) FR can become trapped in homologically non‑trivial cycles, because the right‑hand rule may endlessly traverse a closed walk that cannot be contracted to a point.
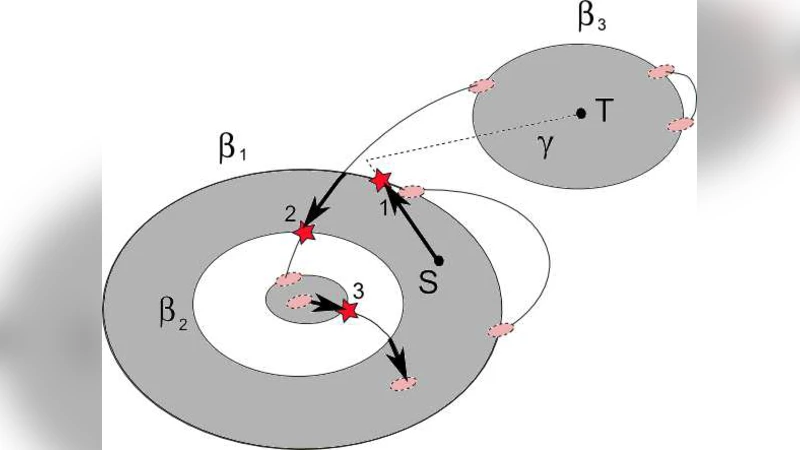
To overcome this limitation, the authors assume that each node has access to a homology basis of the underlying surface. A homology basis consists of (2g) simple closed curves whose homology classes generate the first homology group (H_{1}) of the surface. The key mathematical insight, proved in Lemma \ref{lem:connectFaceBdr}, is that every face boundary of the embedded graph must intersect at least one curve of the homology basis. Consequently, while traversing a face, a router will inevitably encounter a “cut‑curve” that can be used to leave the current face and avoid getting stuck in a non‑trivial loop.
GFR operates as follows: a packet at a node knows its current position, the destination identifier, and a small amount of local state (the index of the current cut‑curve, if any). It proceeds by the right‑hand rule until it reaches a vertex that lies on a basis curve. At that point the algorithm switches to follow the basis curve for a bounded number of steps, thereby crossing the homologically non‑trivial barrier. After crossing, the packet resumes the right‑hand walk on the new face. Repeating this process guarantees that the packet eventually reaches the face containing the destination, and then the destination vertex itself.
The algorithm’s resource usage is modest. Each node stores (O(g\log n)) bits: the identifier of the current basis curve (requiring (\log g) bits) and a logarithmic amount of information to encode its position relative to the basis. The worst‑case running time is (O(g^{2}n^{2})), derived from the fact that the packet may have to explore all faces (up to (O(n))) and, for each face, examine up to (g) basis curves, with each traversal potentially costing (O(gn)) steps. For fixed genus—typical in many practical scenarios such as sensor networks on curved surfaces—this yields polynomial‑time performance that is acceptable given the strong guarantee of delivery.
From a theoretical standpoint, the work shows that the efficiency of FR stems from the codimension‑one nature of an embedded graph rather than the flatness of the plane. By extending the right‑hand rule with homology information, the authors demonstrate that similar guarantees can be achieved on any orientable surface, regardless of its curvature. This bridges a gap between planar ad‑hoc routing and the emerging need for routing in three‑dimensional environments (e.g., drone swarms, underwater sensor fields, or networks deployed on complex architectural structures).
Practically, GFR can serve as a foundation layer for more sophisticated protocols. Existing planar routing schemes augment FR with local heuristics to handle edge crossings; analogously, GFR can be combined with geographic or probabilistic techniques to improve latency, load balancing, or energy consumption in 3‑D networks. The paper also highlights that, to date, no efficient local routing algorithm with logarithmic memory exists for genuine three‑dimensional ad‑hoc networks; GFR fills this void at the theoretical level.
Future research directions suggested by the authors include: (1) algorithms for distributed construction of a homology basis without global knowledge; (2) time‑complexity reductions through smarter traversal strategies or caching of previously crossed basis curves; (3) robustness analyses under node failures, dynamic topology changes, and realistic wireless communication models; and (4) experimental validation on simulated and real-world 3‑D sensor deployments. In sum, the paper delivers a mathematically rigorous, memory‑efficient, and universally applicable routing scheme that extends the celebrated Face Routing paradigm to surfaces of any genus, opening new avenues for reliable communication in complex spatial networks.
Comments & Academic Discussion
Loading comments...
Leave a Comment