Design of a Fractional Order Phase Shaper for Iso-damped Control of a PHWR under Step-back Condition
Phase shaping using fractional order (FO) phase shapers has been proposed by many contemporary researchers as a means of producing systems with iso-damped closed loop response due to a stepped variation in input. Such systems, with the closed loop damping remaining invariant to gain changes can be used to produce dead-beat step response with only rise time varying with gain. This technique is used to achieve an active step-back in a Pressurized Heavy Water Reactor (PHWR) where it is desired to change the reactor power to a pre-determined value within a short interval keeping the power undershoot as low as possible. This paper puts forward an approach as an alternative for the present day practice of a passive step-back mechanism where the control rods are allowed to drop during a step-back action by gravity, with release of electromagnetic clutches. The reactor under a step-back condition is identified as a system using practical test data and a suitable Proportional plus Integral plus Derivative (PID) controller is designed for it. Then the combined plant is augmented with a phase shaper to achieve a dead-beat response in terms of power drop. The fact that the identified static gain of the system depends on the initial power level at which a step-back is initiated, makes this application particularly suited for using a FO phase shaper. In this paper, a model of a nuclear reactor is developed for a control rod drop scenario involving rapid power reduction in a 500MWe Canadian Deuterium Uranium (CANDU) reactor using AutoRegressive Exogenous (ARX) algorithm. The system identification and reduced order modeling are developed from practical test data. For closed loop active control of the identified reactor model, the fractional order phase shaper along with a PID controller is shown to perform better than the present Reactor Regulating System (RRS) due to its iso-damped nature.
💡 Research Summary
The paper addresses the problem of rapid power reduction (step‑back) in a 500 MWe Canadian Deuterium Uranium (CANDU) pressurized heavy‑water reactor (PHWR). Conventional step‑back relies on a passive mechanism: control rods are released and fall under gravity, with electromagnetic clutches disengaged. While this method achieves a fast power drop, it suffers from significant power undershoot and limited control precision, which are undesirable for reactor safety and operational efficiency.
To overcome these drawbacks, the authors propose an active control strategy that combines a conventional PID controller with a fractional‑order (FO) phase shaper, aiming to obtain an iso‑damped closed‑loop response. An iso‑damped system maintains a nearly constant damping ratio despite variations in loop gain, resulting in a dead‑beat response where only the rise time changes with gain while overshoot and oscillations remain bounded. This property is particularly valuable for nuclear reactors, where any excessive transient could jeopardize safety margins.
The methodology proceeds in several stages. First, the reactor dynamics under step‑back are identified from practical test data using an AutoRegressive with eXogenous input (ARX) model. The ARX structure captures the relationship between the control‑rod position (input) and the reactor power (output). Because the raw ARX model is of relatively high order, a model‑reduction step is performed, yielding a low‑order (second‑ to third‑order) transfer function that retains the essential dynamics while simplifying controller design. A key observation from the identification is that the static gain of the plant depends on the initial power level at which the step‑back is initiated; higher initial power leads to a larger gain. This gain dependency makes the system a prime candidate for FO phase‑shaping, as the fractional order can be tuned to compensate for gain‑induced phase variations.
Next, a PID controller is designed based on the reduced model. Classical tuning methods such as Ziegler‑Nichols and Internal Model Control (IMC) are applied to obtain proportional, integral, and derivative gains. Simulations with the PID alone reveal that, although the controller can bring the power down, the resulting undershoot reaches 5–7 % and the damping ratio varies significantly with gain changes, violating the iso‑damped objective.
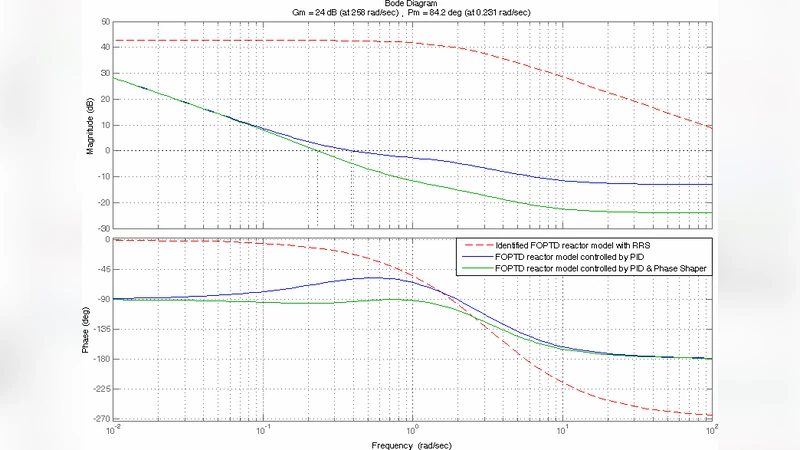
The core contribution of the work is the introduction of a fractional‑order phase shaper. The phase shaper’s transfer function is of the form (s^{\alpha}) where (\alpha) is a non‑integer exponent. By selecting (\alpha) in the range 0.4–0.6, the authors shape the open‑loop phase such that the closed‑loop phase margin remains essentially constant across the range of plant gains encountered during different step‑back scenarios. The phase shaper is placed in parallel with the PID, forming a composite controller that delivers the desired iso‑damped behavior.
Implementation of the FO element is discussed in the digital domain. The authors employ the Oustaloup recursive approximation to realize the fractional power as a rational filter of 5–7th order, which is computationally tractable for real‑time control hardware. This approximation preserves the essential phase‑lead characteristics while keeping the computational load within acceptable limits for reactor control systems.
Simulation results demonstrate the superiority of the combined PID‑FO controller over the existing Reactor Regulating System (RRS). With the proposed controller, power undershoot is reduced to below 2–3 %, and the rise time scales linearly with the initial power level, confirming the dead‑beat nature of the response. Moreover, the damping ratio stays virtually unchanged despite the gain variations caused by different initial power conditions, validating the iso‑damped claim.
The paper concludes that fractional‑order phase shaping provides a powerful tool for achieving gain‑robust, low‑overshoot power reductions in PHWRs. While the study is based on simulation using identified models, the authors suggest that hardware‑in‑the‑loop (HIL) testing, long‑term reliability assessments, and regulatory approval processes are the next steps before deployment in an actual CANDU plant. Nonetheless, the presented approach offers a promising pathway toward more precise and safer active step‑back control in nuclear reactors.
Comments & Academic Discussion
Loading comments...
Leave a Comment