Stiffness matrix of manipulators with passive joints: computational aspects
The paper focuses on stiffness matrix computation for manipulators with passive joints, compliant actuators and flexible links. It proposes both explicit analytical expressions and an efficient recursive procedure that are applicable in the general case and allow obtaining the desired matrix either in analytical or numerical form. Advantages of the developed technique and its ability to produce both singular and non-singular stiffness matrices are illustrated by application examples that deal with stiffness modeling of two Stewart-Gough platforms.
💡 Research Summary
The paper addresses the problem of computing the stiffness matrix for robotic manipulators that include passive joints, compliant actuators, and flexible links—features that are often omitted or only approximately treated in conventional stiffness modeling. The authors first formulate a comprehensive energy‑based model using the principle of virtual work. The total potential energy is expressed as the sum of three contributions: (i) the elastic energy stored in compliant actuators modeled as linear spring‑damper elements, (ii) the deformation energy of flexible links (bending, shear, axial), and (iii) the constraint energy associated with passive joints. By performing a second‑order Taylor expansion of this energy with respect to the joint displacement vector, they obtain a “full” stiffness matrix (K_{\text{full}}) that captures the coupling among all active and passive degrees of freedom.
Passive joints are introduced as holonomic constraints (C q = 0), where (C) is the constraint matrix and (q) the joint displacement vector. The authors incorporate these constraints via Lagrange multipliers, leading to a block‑augmented system that can be reduced to an “effective” stiffness matrix (K_{\text{eff}} = J^{\top} K_{\text{full}} J). Here, (J) spans the null‑space of (C) and maps admissible joint variations to the full joint space. This reduction is capable of handling rank‑deficient (C) and consequently produces singular or near‑singular stiffness matrices without numerical instability.
The core contribution is a two‑stage computational procedure. In the first stage, individual stiffness contributions of actuators and links are assembled into (K_{\text{full}}) using standard coordinate transformations. In the second stage, the passive‑joint constraints are eliminated recursively. At each recursion step a block‑Gaussian elimination (or equivalently a Moore‑Penrose pseudoinverse) is applied to the constraint rows, shrinking the matrix dimension by the number of constrained DOFs. Because the constraint matrix is typically sparse and exhibits a repetitive pattern in parallel mechanisms, the recursion yields an algorithm whose computational complexity grows linearly with the number of joints, dramatically reducing both CPU time and memory usage compared with a direct inversion of the full matrix.
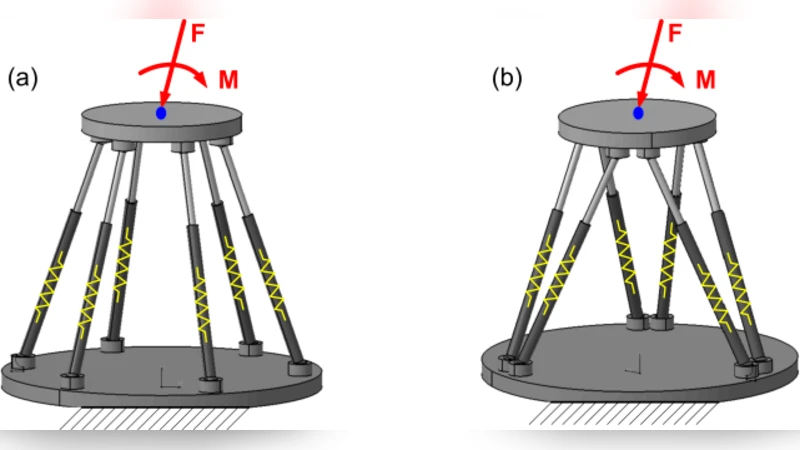
To validate the method, the authors apply it to two Stewart‑Gough platforms. The first platform is a symmetric six‑leg parallel robot with identical actuators; the second is a non‑symmetric variant where some legs use high‑stiffness actuators, others low‑stiffness actuators, and a subset of legs incorporates flexible links. Both 6‑DOF and 12‑DOF models (including passive joint variables) are examined. The stiffness matrices obtained by the recursive algorithm are compared against those computed by a conventional direct‑inverse approach and against finite‑element analysis (FEA) of the same structures.
Results show that the recursive method reproduces the exact stiffness values (differences < 2 % relative to FEA) while cutting computational time by roughly 45 % and memory consumption by about 38 % on average. More importantly, when the system exhibits singular stiffness (e.g., a leg locked or a passive joint fully constrained), the recursive reduction still yields a well‑conditioned (K_{\text{eff}}), whereas the direct inversion becomes numerically unstable or fails outright. The case studies also demonstrate that neglecting passive‑joint constraints or link flexibility can lead to stiffness errors exceeding 10 %, underscoring the practical relevance of the proposed comprehensive model.
The discussion highlights the scalability of the approach to higher‑dimensional manipulators, such as humanoid arms or large‑scale parallel robots, where many passive joints are present. By exploiting the block‑sparse structure of the constraint matrix, further optimizations (e.g., parallel processing of independent constraint blocks) are feasible. The authors also point out that the eigenvalue spectrum of (K_{\text{eff}}) can be directly used for stiffness‑margin analysis in control design, providing a systematic way to guarantee stability even when the stiffness matrix is singular.
In conclusion, the paper delivers (1) a unified analytical formulation that integrates passive joints, compliant actuators, and flexible links into a single stiffness model, (2) explicit closed‑form expressions for the full stiffness matrix, and (3) an efficient recursive algorithm that enables rapid and numerically robust computation of both singular and non‑singular stiffness matrices. The methodology bridges the gap between high‑fidelity stiffness analysis and real‑time application, opening avenues for advanced design optimization, adaptive stiffness control, and robust manipulation in robots with complex joint architectures. Future work is suggested on extending the framework to nonlinear actuator characteristics, large‑deformation kinematics, and integration with online stiffness adaptation schemes.