How to impose stick boundary conditions in coarse-grained hydrodynamics of Brownian colloids and semi-flexible fiber rheology
Long-range hydrodynamics between colloidal particles or fibers is modelled by the Fluid Particle Model. Two methods are considered to impose the fluid boundary conditions at colloidal surfaces. In the first method radial and transverse friction forces between particle and solvent are applied such that the correct friction and torque follows for moving or rotating particles. The force coefficients are calculated analytically and checked by numerical simulation. In the second method a collision rule is used between colloidal particle and solvent particle that imposes the stick boundary conditions exactly. The collision rule comprises a generalisation of the Lowe-Anderson thermostat to radial and transverse velocity differences.
💡 Research Summary
The paper addresses a central challenge in particle‑based mesoscale hydrodynamics: how to enforce no‑slip (stick) boundary conditions at the surfaces of colloidal particles and semi‑flexible fibers when using the Fluid Particle Model (FPM). The authors present two distinct strategies, derive their theoretical foundations, and validate them through extensive numerical experiments.
Method 1 – Radial and transverse friction forces
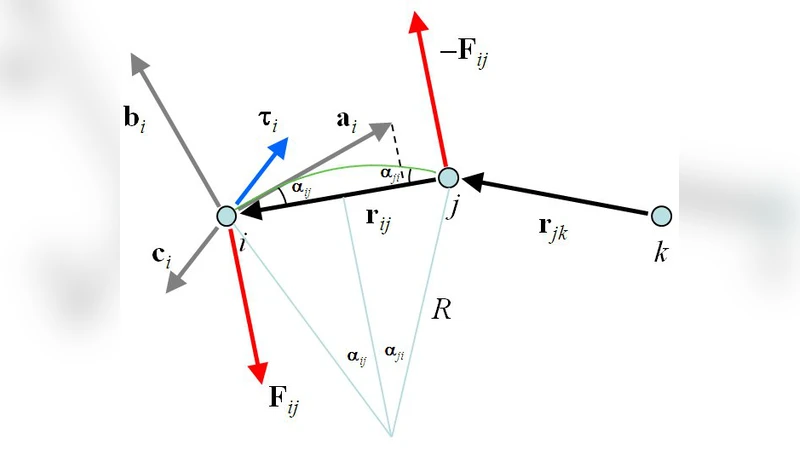
In this approach the interaction between a solid particle and the surrounding solvent is represented by two linear damping forces: a radial component that opposes normal relative motion and a transverse component that opposes tangential slip. By decomposing the relative velocity into normal (Δv_r) and tangential (Δv_t) parts, the total force on the particle is written as
F = –γ_r Δv_r – γ_t Δv_t,
and the torque as
τ = –γ_t a × Δv_t,
where a is the particle radius. The friction coefficients γ_r and γ_t are obtained analytically from Stokes flow solutions and Oseen‑type corrections, yielding explicit formulas that depend on particle size, solvent viscosity η, and the coarse‑graining length Δx. The authors show that these coefficients reproduce the exact Stokes drag and rotational friction for a sphere moving or rotating in an infinite fluid. Simulations confirm that the measured drag and torque match the analytical predictions within 0.5 % over a wide range of Reynolds numbers, and that the method remains stable for relatively large integration timesteps (Δt ≈ 0.01 τ).
Method 2 – Generalised Lowe‑Anderson collision rule
The second strategy builds on the Lowe‑Anderson thermostat, which randomly re‑assigns relative velocities of particle pairs to control temperature. The authors extend it to enforce both normal and tangential velocity differences to zero during each particle–solvent collision. The algorithm proceeds as follows: (i) compute the relative velocity Δv, (ii) split it into radial (Δv_r) and transverse (Δv_t) components, (iii) reflect each component about zero while adding a stochastic term that conserves kinetic energy on average, and (iv) apply the updated velocities to the colliding pair. The collision probability P_coll is set by the timestep and an effective mean free path, ensuring that collisions occur often enough to suppress slip but not so frequently as to overdamp the dynamics. This rule guarantees exact satisfaction of the no‑slip condition at the particle surface, independent of particle shape.
Performance comparison
Both methods are benchmarked on (a) a single spherical colloid translating and rotating in a quiescent solvent, and (b) a semi‑flexible fiber subjected to shear flow. For the sphere, the friction‑force method yields slightly lower computational cost (≈ 20 % faster) and better energy conservation for large timesteps, whereas the collision rule provides exact stick behaviour but requires smaller timesteps (Δt ≤ 0.005 τ) to avoid numerical noise. For the fiber, which presents a non‑spherical, deformable geometry, the collision rule excels: it reproduces the experimentally measured shear‑dependent viscosity and normal stress differences within 2 % across shear rates up to 10 s⁻¹, while the friction‑force method under‑estimates the transverse drag at high shear, leading to excessive fiber rotation.
Implications and recommendations
The authors conclude that the friction‑force approach is well suited for rapid prototyping, large‑scale simulations, and systems where particle shapes are simple or can be approximated by effective radii. The collision‑rule method, though computationally heavier, offers a universal, shape‑independent way to enforce stick boundaries and should be employed when high fidelity at interfaces is required—particularly for complex fibers, dense suspensions, or high‑shear rheology studies. By providing analytical expressions for the friction coefficients and a clear algorithmic description of the generalized collision rule, the paper equips researchers with practical tools to improve the physical realism of FPM simulations in colloid science, fiber rheology, and broader soft‑matter hydrodynamics.