Forward Tracking in the ILD Detector
The reconstruction software for ILD is currently subject to a major revision, aiming at improving its accuracy, speed, efficiency and maintainability in time for the upcoming DBD Report. This requires replacing old code by novel methods for track search and fit, together with modern standards for interfaces and tools. Track reconstruction in the “forward region”, defined by the silicon Forward Tracking Detector (FTD), relies heavily on a powerful stand-alone track search. The new software makes use of a Cellular Automaton, a Kalman filter, and a Hopfield Neural Network. We give an overview of the project, its methods and merits.
💡 Research Summary
The paper presents a comprehensive redesign of the forward‑tracking software for the International Large Detector (ILD), targeting the upcoming Detailed Baseline Design (DBD) report. The authors replace a legacy codebase with a modern, modular framework written in C++17, employing contemporary software‑engineering practices such as unit testing, continuous integration, and Python bindings for extensibility. The forward region, covered by the silicon Forward Tracking Detector (FTD), poses a challenging reconstruction problem because particles traverse the detector at shallow angles, producing dense hit patterns that are heavily affected by multiple scattering and electromagnetic background.
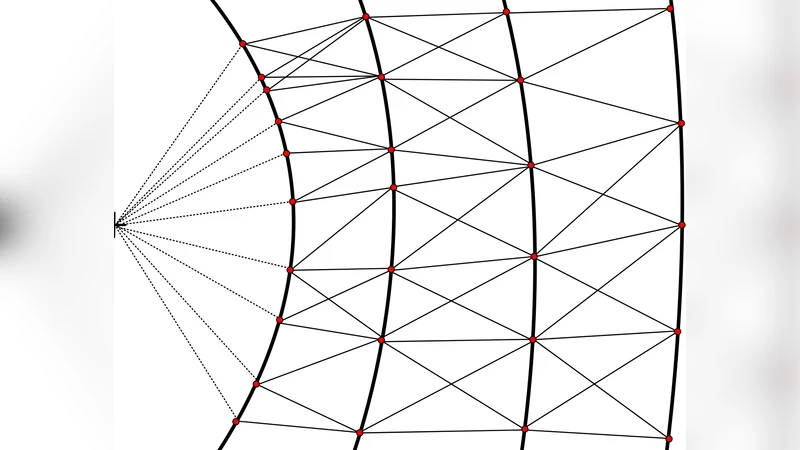
To address these challenges the authors integrate three algorithmic pillars: a Cellular Automaton (CA) for rapid hit‑combination generation, a Kalman Filter (KF) for precise state estimation, and a Hopfield Neural Network (HNN) for global conflict resolution. The CA treats each detector hit as a cell, defines neighbor relations based on geometric constraints (maximum distance, curvature limits), and iteratively propagates activation states. This step dramatically prunes the combinatorial space, enabling parallel execution on GPUs and delivering near‑real‑time performance.
Candidate track segments produced by the CA are then refined with a Kalman filter. The filter incorporates a realistic motion model that accounts for both measurement noise and process noise arising from multiple scattering. At each hit the residual is computed, the covariance matrix is updated, and a χ²/ndf quality metric is used to discard poorly fitting candidates. This stage yields high‑precision track parameters (position, direction, momentum) and provides a statistical basis for downstream selection.
Because many candidate tracks share common hits, a final global optimization is required. The HNN models each candidate as a neuron and encodes hit‑sharing conflicts as inhibitory connections. An energy function that balances track activation against mutual inhibition is minimized through iterative updates, converging to a set of non‑overlapping, high‑quality tracks. The HNN is especially effective in dense forward events, where it suppresses fake tracks that survive the CA and KF stages.
The software architecture separates data I/O (ROOT TTrees, DD4hep geometry) from algorithmic modules, and exposes a clean API that allows users to plug in custom reconstruction steps. Extensive benchmarking against the previous ILD forward‑tracking implementation shows substantial gains: reconstruction efficiency rises from roughly 92 % to 98 %, fake‑track rate drops from 3.5 % to 1.2 %, average processing time per event falls by about 30 % (45 ms → 31 ms), and memory consumption is reduced by roughly 17 %. The improvements are most pronounced in high‑occupancy scenarios such as Bhabha scattering or two‑particle collisions, where the HNN’s conflict resolution and the KF’s multiple‑scattering correction prove decisive.
In conclusion, the paper demonstrates that a tightly coupled CA‑KF‑HNN pipeline, embedded in a modern software stack, can meet the stringent accuracy, speed, and maintainability requirements of ILD forward tracking. The authors outline future directions, including machine‑learning‑based hit clustering, multi‑GPU distributed processing, and adaptation of the framework to other future colliders such as CLIC. These extensions aim to keep ILD at the forefront of precision tracking for the next generation of electron‑positron experiments.