Shape and Trajectory Tracking of Moving Obstacles
This work presents new methods and algorithms for tracking the shape and trajectory of moving reflecting obstacles with broken rays, or rays reflecting at an obstacle. While in tomography the focus of the reconstruction method is to recover the velocity structure of the domain, the shape and trajectory reconstruction procedure directly finds the shape and trajectory of the obstacle. The physical signal carrier for this innovative method are ultrasonic beams. When the speed of sound is constant, the rays are straight line segments and the shape and trajectory of moving objects will be reconstructed with methods based on the travel time equation and ellipsoid geometry. For variable speed of sound, we start with the eikonal equation and a system of differential equations that has its origins in acoustics and seismology. In this case, the rays are curves that are not necessarily straight line segments and we develop algorithms for shape and trajectory tracking based on the numerical solution of these equations. We present methods and algorithms for shape and trajectory tracking of moving obstacles with reflected rays when the location of the receiver of the reflected ray is not known in advance. The shape and trajectory tracking method is very efficient because it is not necessary for the reflected signal to traverse the whole domain or the same path back to the transmitter. It could be received close to the point of reflection or far away from the transmitter. This optimizes the energy spent by transmitters for tracking the object, reduces signal attenuation and improves image resolution. It is a safe and secure method. We also present algorithms for tracking the shape and trajectory of absorbing obstacles. The new methods and algorithms for shape and trajectory tracking enable new applications and an application to one-hop Internet routing is presented.
💡 Research Summary
The paper introduces a novel framework for reconstructing both the shape and trajectory of moving obstacles using only ultrasonic beams that are either reflected or absorbed by the obstacles. Unlike conventional tomography, which focuses on recovering the internal velocity field of a medium, this approach directly determines the geometry and motion of the obstacle itself. The authors consider a bounded three‑dimensional domain Ω₀ containing a convex moving obstacle Ω₁(t) with a smooth boundary. Two distinct physical regimes are treated: (1) a homogeneous medium where the speed of sound is constant, and (2) an inhomogeneous medium where the speed varies spatially.
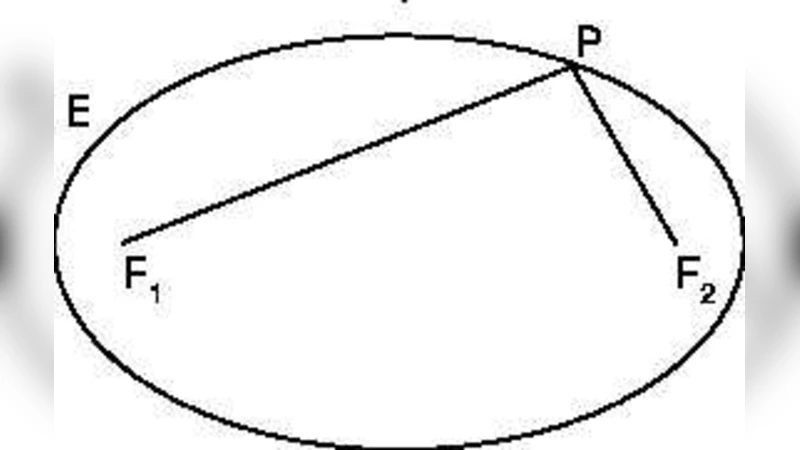
In the homogeneous case, the travel time t of a pulse emitted from a transmitter point L on the observation boundary ∂Ω₀, reflected at a point P on the obstacle surface, and received at a point S on ∂Ω₀ satisfies |LP|+|PS| = v·t = 2a. With L and S fixed, the set of possible P lies on an ellipse (in 2‑D) or an ellipsoid of revolution (in 3‑D) having foci at L and S. By introducing the focal distance c = |LS|/2 and the semi‑major axis a = vt/2 (with a > c), the authors derive explicit parametric formulas for the coordinates of P in terms of the measured angles φ (inclination) and θ (azimuth). Equation (16) provides a direct mapping from each measured travel time to a point on the obstacle surface. By sweeping φ and θ over a dense grid, or by random sampling, a dense point cloud of the obstacle boundary can be generated from a single set of transmitter‑receiver pairs. This method requires no prior knowledge of the receiver location; the receiver may be placed arbitrarily on the observation boundary, even close to the point of reflection, which reduces energy loss and improves resolution.
For the inhomogeneous case, the authors start from the wave equation u_tt – c²(x)Δu = 0 and apply a high‑frequency (WKB) ansatz u ≈ A(x) e^{iω(W(x)–t)}. The leading order yields the eikonal equation |∇W|² = 1/c²(x). Recognizing that ∇W points normal to wavefronts and is tangent to ray trajectories, they formulate a system of first‑order ordinary differential equations governing the ray path R(s) = (x(s),y(s),z(s)) as a function of arc length s. By converting to spherical coordinates (φ,θ) for the ray direction, they obtain the classic ray‑tracing equations:
dx/dt = c(x,y,z) sinφ cosθ
dy/dt = c(x,y,z) sinφ sinθ
dz/dt = c(x,y,z) cosφ
dφ/dt = –cosφ (∂c/∂x cosθ + ∂c/∂y sinθ) + ∂c/∂z sinφ
dθ/dt = (1/ sinφ)(∂c/∂x sinθ – ∂c/∂y cosθ)
These equations are identical to those used in seismic ray tracing and acoustic modeling. By numerically integrating this system for each emitted beam, the curved ray paths in a variable‑speed medium are recovered, and the intersection of a ray with the obstacle surface yields the reflection point P. The travel time associated with each ray provides the necessary scalar constraint to locate P uniquely.
The paper also addresses the case of absorbing obstacles, where reflected signals are absent and travel times become effectively infinite. In this scenario, the authors propose to launch multiple beams from different transmitters, compute their theoretical paths using the ray‑tracing equations, and then identify the region where these paths intersect. The intersection region approximates the location and shape of the absorbing object, because only beams that intersect the obstacle are “lost.”
A practical concern—how many receivers are needed on ∂Ω₀?—is tackled by introducing a distributed receiver scheme. If N receivers move uniformly along the boundary with speed v_f, the time required to sweep the entire boundary is t_c = L(∂Ω₀)/(N·v_f), where L(∂Ω₀) is the perimeter length. By ensuring t_c < t_min (the minimum interval between successive transmissions), every reflected signal will be captured by at least one receiver. The authors further relate the required number of receivers to their mass M and kinetic energy E_k, yielding an expression for the minimal N that satisfies the timing constraint. This analysis demonstrates that a modest number of mobile receivers can replace a dense static array, reducing hardware cost and complexity.
Finally, the authors illustrate an unconventional application to one‑hop Internet routing. By treating each node’s processing delay as an analogue of acoustic travel time, the obstacle reconstruction problem maps onto the problem of finding a low‑delay path through a network. The same geometric principles used to locate a moving obstacle can be employed to infer optimal routing decisions in real time, suggesting a cross‑disciplinary bridge between physical wave propagation and network optimization.
Overall, the paper delivers a comprehensive theoretical foundation—elliptic geometry for constant speed, eikonal‑based ray tracing for variable speed—and translates it into concrete algorithms for shape and trajectory tracking of both reflecting and absorbing moving obstacles. The work emphasizes energy efficiency, reduced receiver deployment, and robustness to unknown receiver locations, positioning the methodology as a promising tool for ultrasonic imaging, autonomous navigation, underwater acoustics, and even network routing.
Comments & Academic Discussion
Loading comments...
Leave a Comment