Synthesis of Distributed Control and Communication Schemes from Global LTL Specifications
We introduce a technique for synthesis of control and communication strategies for a team of agents from a global task specification given as a Linear Temporal Logic (LTL) formula over a set of properties that can be satisfied by the agents. We consider a purely discrete scenario, in which the dynamics of each agent is modeled as a finite transition system. The proposed computational framework consists of two main steps. First, we extend results from concurrency theory to check whether the specification is distributable among the agents. Second, we generate individual control and communication strategies by using ideas from LTL model checking. We apply the method to automatically deploy a team of miniature cars in our Robotic Urban-Like Environment.
💡 Research Summary
The paper presents a systematic method for automatically synthesizing individual control and communication strategies for a team of agents from a global task specification expressed as a Linear Temporal Logic (LTL) formula over a set of atomic properties. The agents are modeled as finite transition systems (TS), each capable of satisfying a subset of the properties; some properties may be shared and require simultaneous satisfaction by multiple agents. The overall problem is to generate, for each agent, a finite (or infinite) trajectory—called a cc‑strategy—that respects the agent’s dynamics, satisfies its local properties, and coordinates with other agents on shared properties, such that the collective behavior of the team satisfies the global LTL specification.
The proposed framework consists of two main phases:
-
Distributability Check (Trace‑Closedness).
The global LTL formula φ is first translated into an equivalent Büchi automaton B_φ, whose language L(B_φ) contains exactly the infinite words over the property alphabet Σ that satisfy φ. The set of properties is partitioned into a distribution {Σ_i} reflecting each agent’s capabilities. Using concepts from concurrency theory, the authors test whether L(B_φ) is trace‑closed with respect to this distribution: for any word w in L(B_φ), all words that are trace‑equivalent to w (i.e., have the same projection on each Σ_i) must also belong to L(B_φ). If the language is trace‑closed, the global specification can be safely decomposed into local specifications; otherwise, the method aborts, reflecting a conservative design choice. -
Implementability Construction.
For each agent i, a local transition system T_i = (S_i, s_{0i}, →_i, Σ_i, h_i) is given, where the output map h_i labels each state with the single property that holds there. A cc‑strategy for agent i is a sequence of states that (i) starts at the initial state, (ii) visits states in the prescribed order, and (iii) triggers a communication protocol whenever a shared property is encountered: the agent broadcasts the property and waits until all other agents that share it have also broadcast, thereby guaranteeing simultaneous satisfaction.To capture the set of all feasible joint executions, the authors construct for each agent an implementable automaton B_i that encodes both the dynamics of T_i and the synchronization constraints on shared properties. The product (language‑wise) of all B_i yields an automaton B_imp whose language L(B_imp) consists of all infinite words that can be generated by the team while respecting dynamics and communication rules.
The final synthesis step computes the intersection L(B_φ) ∩ L(B_imp). If this intersection is non‑empty, any word ω from it is selected. By projecting ω onto each Σ_i, local words w_i are obtained; each w_i is then mapped back to a concrete path in T_i, producing the desired cc‑strategies. The resulting strategies guarantee that (a) each agent follows a feasible trajectory in its own transition system, (b) shared properties are satisfied synchronously via the defined communication protocol, and (c) the overall execution satisfies the original LTL specification.
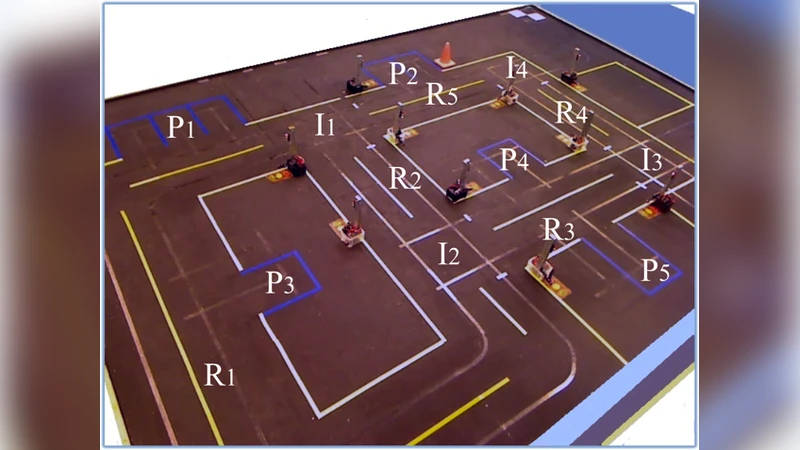
The authors validate the approach on a physical testbed called the Robotic Urban‑Like Environment (RULE), built with Khepera III miniature cars navigating a graph of labeled road segments, intersections, and parking lots. The global LTL tasks include requirements such as “eventually service every request”, “never enter unsafe regions”, and “when a request is shared, all required robots must be present simultaneously”. The synthesis algorithm automatically generates local motion plans and communication schedules; the robots execute them, and experimental logs confirm that the global specification is met without deadlocks.
Key contributions highlighted in the paper are:
- Extending the notion of trace‑closedness from concurrency theory to LTL specifications, thereby enabling the decomposition of rich temporal logic tasks (beyond regular languages) into distributed sub‑tasks.
- Introducing a formal model of communication‑enabled control strategies (cc‑strategies) that integrates synchronization on shared properties directly into the synthesis process.
- Demonstrating a complete toolchain—from LTL formula to Büchi automaton, through distributability checking, to implementable automaton construction and final strategy extraction—implemented on real robots.
The authors acknowledge limitations: the method inherits the classic state‑space explosion problem, and frequent synchronization may incur communication overhead. Future work is proposed on partial synthesis techniques, compositional verification, and hierarchical abstraction pipelines that could scale the approach to larger teams and hybrid (continuous‑discrete) dynamics.
Overall, the paper offers a rigorous, automata‑theoretic pathway to bridge high‑level temporal logic specifications and low‑level executable control policies for multi‑robot systems, advancing the state of the art in distributed formal synthesis.
Comments & Academic Discussion
Loading comments...
Leave a Comment