Design and Validation of Safety Cruise Control System for Automobiles
In light of the recent humongous growth of the human population worldwide, there has also been a voluminous and uncontrolled growth of vehicles, which has consequently increased the number of road accidents to a large extent. In lieu of a solution to the above mentioned issue, our system is an attempt to mitigate the same using synchronous programming language. The aim is to develop a safety crash warning system that will address the rear end crashes and also take over the controlling of the vehicle when the threat is at a very high level. Adapting according to the environmental conditions is also a prominent feature of the system. Safety System provides warnings to drivers to assist in avoiding rear-end crashes with other vehicles. Initially the system provides a low level alarm and as the severity of the threat increases the level of warnings or alerts also rises. At the highest level of threat, the system enters in a Cruise Control Mode, wherein the system controls the speed of the vehicle by controlling the engine throttle and if permitted, the brake system of the vehicle. We focus on this crash area as it has a very high percentage of the crash-related fatalities. To prove the feasibility, robustness and reliability of the system, we have also proved some of the properties of the system using temporal logic along with a reference implementation in ESTEREL. To bolster the same, we have formally verified various properties of the system along with their proofs.
💡 Research Summary
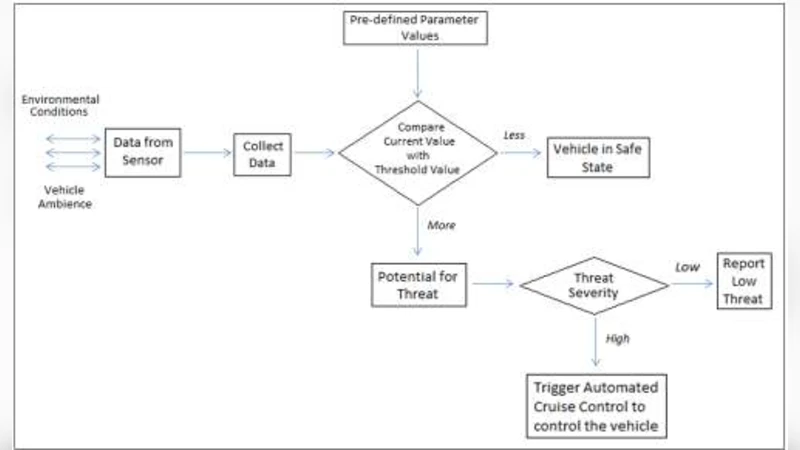
The paper addresses the growing problem of road accidents caused by the rapid increase in vehicle numbers worldwide. It proposes a “Safety Cruise Control System” that combines a forward‑looking automotive radar sensor with a safety algorithm and a cruise‑control subsystem, all implemented in the synchronous, imperative language ESTEREL. The system continuously monitors three key parameters—distance to the lead vehicle or obstacle, relative speed, and azimuth (although the azimuth is omitted in the presented code). These measurements are compared against predefined thresholds. The thresholds can be set in three ways: (1) manufacturer‑defined defaults, (2) driver‑customized values, and (3) automatically learned values that adapt to environmental conditions such as rain or fog.
When the measured values are within safe limits, the system remains passive. If a potential collision is detected, the safety algorithm raises an alert through the Driver Vehicle Interface (DVI). The alert level is proportional to the severity of the threat: low‑level warnings are visual or auditory cues, while high‑level threats trigger the Cruise Control subsystem to take over vehicle speed control. In this “Cruise Control Mode,” the system modulates engine throttle and, when permissible, applies the brakes to reduce speed and avoid impact. The driver is simultaneously informed of the takeover.
The architecture consists of several ESTEREL modules that run in parallel and communicate via broadcasted signals. Key modules include SET_PREDEFINED_VALUES (initializes threshold values), ENVIRONMENT_CHECK (adjusts thresholds based on weather or road conditions), ROAD_DATA (processes sensor data), HOST_VEHICLE (maintains vehicle state), and DRIVER_ALARM (generates driver alerts). The main module, SAFETY_SYSTEM, orchestrates these sub‑modules using the ESTEREL parallel composition operator “||”.
A major contribution of the work is the formal verification of safety properties using temporal logic. The authors specify properties such as “if a risk is detected, an alarm must be raised within one second” and “in a high‑risk situation, the cruise control must initiate deceleration within half a second.” These properties are verified against the finite‑state machines generated by the ESTEREL compiler using a model‑checking tool, providing mathematical assurance of correctness.
The paper also discusses the choice of ESTEREL for this application. ESTEREL’s synchronous semantics guarantee deterministic reaction to inputs, which is essential for real‑time automotive control. Its ability to compile to hardware‑friendly finite‑state machines makes it suitable for embedding in electronic control units (ECUs).
However, the study has several limitations. First, the implementation ignores azimuth data, which could reduce detection accuracy in multi‑lane or intersection scenarios. Second, while the authors propose automatic learning of thresholds, no concrete algorithm or training data is described, leaving the adaptability claim unsubstantiated. Third, the resource requirements (memory footprint, CPU cycles) of the ESTEREL-generated code are not evaluated, raising questions about feasibility on typical automotive ECUs. Finally, the validation is limited to simulation and formal proofs; no real‑vehicle experiments or field tests are presented to demonstrate performance under actual driving conditions.
In conclusion, the paper presents a novel integration of synchronous programming, formal verification, and sensor‑based risk assessment for automotive safety. It demonstrates how a tiered warning and control strategy can be systematically designed and mathematically verified. Future work should extend the sensor suite (e.g., adding cameras or LiDAR), implement concrete adaptive learning mechanisms, conduct extensive on‑road testing, and assess the implementation’s hardware overhead to move the concept from prototype to production‑ready automotive safety technology.
Comments & Academic Discussion
Loading comments...
Leave a Comment