Status of Telescope Fabra ROA at Montsec: Optical Observations for Space Surveillance & Tracking
The telescope Fabra ROA at Montsec (TFRM) is a 0.5m f/1 refurbished Baker-Nunn Camera (BNC) operated by a collaboration between the Fabra Observatory - Royal Academy of Arts and Sciences of Barcelona and the Spanish Navy Observatory (ROA), and installed at Montsec Astronomical Observatory (Spain). Among other capabilities, its CCD FoV (4.4{\deg}x4.4{\deg}), the telescope tracking at arbitrary RA and DEC rates, and the CCD shutter commanding at will during the exposure are specially remarkable for Space Surveillance and Tracking (SST) observational programs. On Feb 2011, the TFRM participated, in the CO-VI third run satellite tracking campaign of the ESA SST/Space Surveillance Awareness Preparatory Program (SST/SSA-PP). During this multi-asset 7-day campaign the TFRM conducted systematic observations of artificial satellites which yielded to the determination of 1137 accurate position measurements. Since Feb 2011, the TFRM is observing in remote and fully unattended robotic modes under commissioning status. A summary of the results of the ESA CO-VI SST optical observational campaign and insights of other SST-like observations in process will be presented.
💡 Research Summary
The paper presents a comprehensive overview of the Telescope Fabra ROA at Montsec (TFRM), a 0.5 m f/1 refurbished Baker‑Nunn Camera (BNC) that has been transformed into a fully robotic optical sensor for Space Surveillance and Tracking (SST). Originally built in 1958 by the Smithsonian Institution for photographic satellite tracking, the BNC was donated to the Spanish Navy Observatory (ROA) after the advent of modern radar‑based systems such as GEODSS. Recognizing the exceptional optical quality of the BNC—its fast focal ratio, large aperture, and low‑distortion wide field—the authors embarked on a four‑year refurbishment project (≈ €500 k) that culminated in September 2010.
Key technical upgrades include the addition of two corrective lenses (a meniscus and a field flattener) that expand the usable flat field to a 6.25° diameter, while preserving a 20 µm spot size across the field. A 4 k × 4 k Finger Lakes PL16803 CCD (9 µm pixels, 3.88″ per pixel) provides a 4.4° × 4.4° field of view with a pixel scale suitable for both point‑source astrometry and fast‑moving satellite trails. The focus mechanism is athermal with ±10 µm repeatability, and the detector is cooled by a glycol recirculation chiller, ensuring thermal stability.
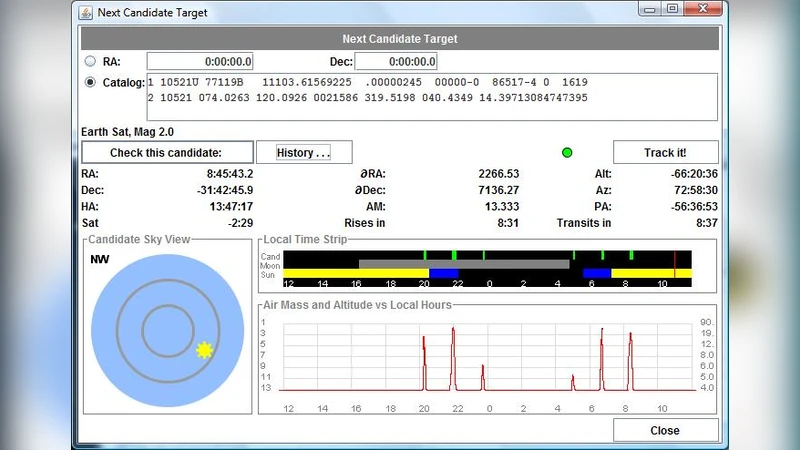
The telescope is mounted on a servo‑driven equatorial platform capable of slewing at up to 2° s⁻¹. Crucially, the control software is built on the INDI (Instrument Neutral Distributed Interface) framework, customized with Java remote clients and robotic schedulers. INDI’s target tracking module can ingest Two‑Line Element (TLE) sets and continuously compute the instantaneous right‑ascension and declination rates required to keep a satellite centered, thereby automating what traditionally required manual ephemeris updates. The CCD shutter can be triggered with 0.1 ms precision during an exposure, enabling multiple sub‑exposures, star‑trail mitigation, and dynamic exposure control for objects with widely varying apparent motion.
Performance testing during the commissioning phase (late 2010 onward) demonstrated a limiting magnitude of V ≈ 20 mag with a 30 s exposure, a field free of noticeable optical aberrations, and astrometric accuracies of 0.25″ for point sources and 0.50″ for trailed images (the latter measured with SExtractor). When combined with the APEX‑II software, the system achieved improved astrometric precision for GEO debris and demonstrated reliable automatic detection of faint GEO objects.
The TFRM’s capabilities were validated during the ESA CO‑VI satellite tracking campaign (30 Jan–7 Feb 2011), part of the Space Surveillance Awareness Preparatory Program (SST/SSA‑PP). Operating in a semi‑robotic mode under human supervision, the telescope recorded 1 137 precise position measurements of various artificial satellites, including GEO, MEO, and LEO targets. Orbit determination using AGI’s Orbit Determination Tool Kit (ODTK) on 175 angular measurements of the MSG2 satellite over four nights yielded 2‑σ uncertainties of ~12 m in semi‑major axis, 1.8 × 10⁻⁶ in eccentricity, and 1.5 × 10⁻⁴ deg in inclination, with the expected increase in in‑track uncertainty during daylight. These results compare favorably with traditional ground‑based radar and demonstrate the utility of a fast, wide‑field optical system for high‑precision GEO monitoring.
Beyond the ESA campaign, the TFRM has been integrated into the International Scientific Optical Network (ISON) for GEO debris surveys, and it supports a variety of other scientific programs (exoplanet transits, Near‑Earth Object searches, X‑ray/γ‑ray counterpart identification). Ongoing upgrades include the installation of a higher‑sensitivity CMOS detector, refinement of automatic trail‑tracking algorithms, and expanded collaboration with satellite control agencies for calibration against authoritative orbital elements.
In summary, the TFRM exemplifies how a modest‑aperture, ultra‑fast optical instrument can be modernized into a versatile, fully robotic SST platform. Its combination of a large, aberration‑free field, rapid arbitrary‑rate tracking, and precise shutter control enables simultaneous observation of objects ranging from faint GEO debris (V ≈ 20 mag) to fast‑moving LEO satellites, delivering sub‑arcsecond astrometry and orbit determination accuracies comparable to larger, more expensive facilities. The project thus fills a niche in the European and global space‑situational‑awareness infrastructure, offering a cost‑effective, high‑performance solution for continuous optical monitoring of the increasingly congested near‑Earth environment.
Comments & Academic Discussion
Loading comments...
Leave a Comment