Nerio: Leader Election and Edict Ordering
Coordination in a distributed system is facilitated if there is a unique process, the leader, to manage the other processes. The leader creates edicts and sends them to other processes for execution or forwarding to other processes. The leader may fail, and when this occurs a leader election protocol selects a replacement. This paper describes Nerio, a class of such leader election protocols.
💡 Research Summary
**
The paper introduces Nerio, a family of leader‑election protocols that simultaneously guarantee a unique leader and a globally consistent ordering of the commands (edicts) issued by that leader. The authors begin by enumerating seven desirable properties for any leader‑election scheme in a distributed system: Leader Uniqueness, Edict Validity, Edict Ordering, Leader Stability, Eventual Election, Fault Tolerance, and Efficiency. The first three concern the correctness of the leader and the commands it creates; the next three address liveness under failures; the last one concerns resource consumption.
The core of Nerio is the combination of leases and quorum systems. A quorum system Q is a collection of subsets of the process set P such that any two quorums intersect. Each process q maintains four local variables: a monotonically increasing clock C_q, an assignee A_q (the process to which q is currently granting a lease), a finish time F_q (the expiration of the current lease on q’s clock), and an expiration time E_p (the time until which p believes it is still leader). A lease from q to p exists at real time t if A_q(t)=p and C_q(t)<F_q(t). A process p is defined to be leader at time t iff there exists a quorum Q∈Q such that every q∈Q currently grants a lease to p. Because quorums intersect, two different processes cannot both satisfy this condition at the same instant, which directly yields Leader Uniqueness.
The paper formalizes the relationship between a process’s local clock and real time using an invertible function c_p(·). The invariant C_p(t) < E_p(t) ⇒ isLeader(p,t) is established; the converse does not hold because a process may retain a lease after it has stopped extending it. The authors then develop two concrete protocols that maintain this invariant under different clock assumptions.
-
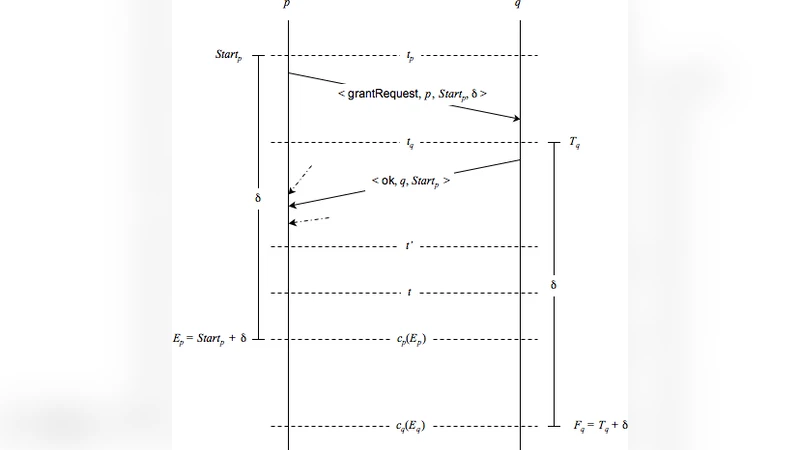
Bounded‑Drift Protocol (OQwBD) – Each clock may run faster or slower than real time by at most a factor ρ (|C_p(t+δ)−C_p(t)−δ| ≤ ρ·δ). A candidate p samples its clock (Start_p), selects a lease duration δ, and broadcasts a grantRequest (p, Start_p, δ). Upon receipt, a process q records its local time T_q, checks whether it is already leasing to another process, and if not sets A_q←p and extends its finish time to F_q←max(F_q, T_q+(1+ρ)·δ). It then replies with an ok containing Start_p. Candidate p waits until its own clock reaches Start_p+(1−ρ)·δ; if it has collected ok responses from a quorum before that deadline, it sets its expiration E_p←Start_p+(1−ρ)·δ and becomes leader. The proof shows that for any q in the quorum, c_p(E_p) ≤ c_q(F_q), guaranteeing that the lease held by q covers the entire interval during which p believes itself to be leader.
-
Bounded‑Skew Protocol (OQwBS) – Instead of bounding drift, this version assumes that at any real time the clocks of any two processes differ by at most Δ. The algorithm is similar, but q computes its finish time as F_q←max(F_q, Start_p+δ+Δ) and p’s deadline is simply Start_p+δ. Because the skew bound is known, a lease cannot be extended beyond Δ past p’s intended expiration, avoiding the “over‑grant” problem of the drift‑based version.
Both protocols satisfy the formal properties:
- Leader Uniqueness follows from the quorum intersection property and the lease‑expiration ordering proved above.
- Leader Stability is expressed using the Global Stabilization Time (GST) model: after GST, message delays are bounded and no further failures occur; the protocol guarantees that a leader that is elected before GST will continue to be elected indefinitely.
- Eventual Election is proved by showing that, after GST, any process that repeatedly initiates the protocol will eventually obtain a quorum of ok responses, because a bounded number of failures can be tolerated and the quorum intersection ensures progress.
- Fault Tolerance is inherent: a crashed process’s clock continues to increase (the growth condition), so any lease it previously granted will eventually expire, allowing other processes to acquire a new quorum.
- Edict Validity is enforced by requiring that only a process that currently satisfies isLeader(p,t) may create an edict; the edict carries the creator’s identifier and the real‑time creation timestamp (which the creator cannot know precisely, but the system can treat it as an immutable attribute).
- Edict Ordering is achieved because every edict carries its creation timestamp; any recipient that sees two edicts can compare these timestamps to infer the true creation order, regardless of message reordering or delays. The protocol guarantees that the timestamps are consistent with the lease intervals, so no two leaders can issue overlapping edicts with contradictory ordering.
The paper also discusses practical considerations. Hardware clocks typically guarantee bounded drift (10⁻⁷–10⁻⁵) but not bounded skew, making OQwBD more realistic on bare metal. In virtualized environments, direct access to the hardware clock may be restricted (e.g., VMware), but performance counters or hypervisor‑provided raw clocks can be used if they expose a drift bound. Migration of virtual machines can cause abrupt clock jumps, violating both assumptions; therefore, system designers must either avoid migration during critical periods or supplement Nerio with an external synchronization service.
Efficiency is highlighted: each protocol requires only a single broadcast and a quorum of replies per lease acquisition, and each process stores only a few scalar variables. No heavyweight failure detectors or consensus instances are needed, which keeps both network traffic and storage overhead low.
In summary, Nerio presents a clean, formally verified framework that unifies leader election with total ordering of commands in asynchronous, failure‑prone environments. By leveraging leases and quorum intersections, it sidesteps the need for accurate failure detection while still providing strong liveness and safety guarantees. The two concrete instantiations (bounded drift and bounded skew) give practitioners flexibility to match the protocol to the clock guarantees of their deployment platform, making Nerio applicable to a wide range of distributed systems such as replicated state machines, distributed databases, and microservice orchestrators where both a unique coordinator and a consistent command order are essential.
Comments & Academic Discussion
Loading comments...
Leave a Comment