Distributed Adaptive Attitude Synchronization of Multiple Spacecraft
This paper addresses the distributed attitude synchronization problem of multiple spacecraft with unknown inertia matrices. Two distributed adaptive controllers are proposed for the cases with and without a virtual leader to which a time-varying refe…
Authors: ** Zhongkui Li (베이징 공과대학 자동화학부) Zhisheng Duan (북경대 기계·항공우주공학부, 국가중점실험실) **
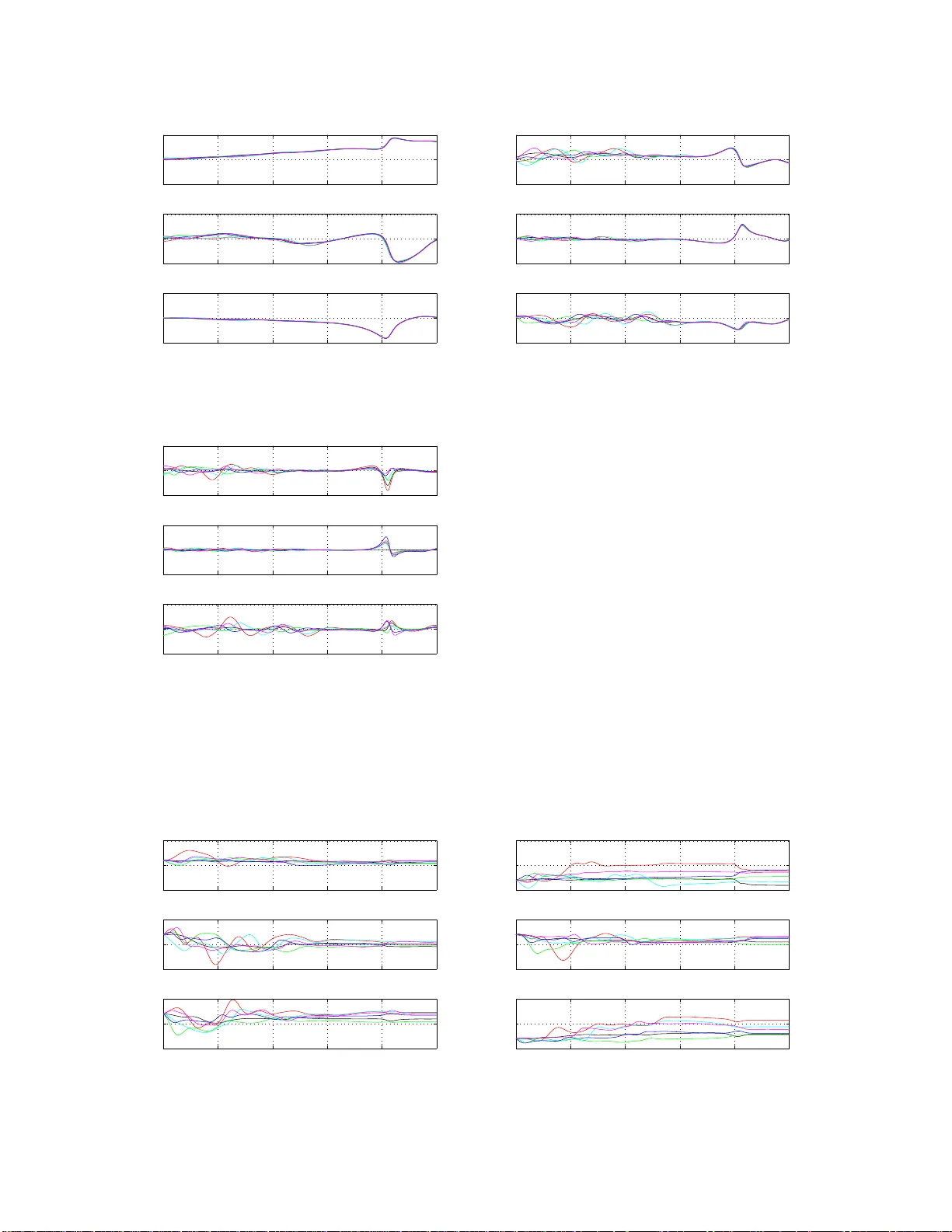
Distributed Adaptiv e A ttitude Sync hronization of Multi ple Spacecraft ∗ Zhongkui Li and Zhisheng Duan Abstract : This pap er addresses the distributed attitude synchronization problem o f multiple spac ecraft with unknown inertia matrices. Two distributed adaptive controllers ar e pr o p o sed for the cases with and without a virtua l leader to which a time-v arying refere nce attitude is a ssigned. The firs t controller achiev es attitude synchronization for a gr oup o f spacecr aft with a leaderles s co mm unication to po logy having a directed spanning tree. The second controller g ua rantees that all spa c ecraft track the reference attitude if the virtual leader ha s a directed pa th to all other spa c e craft. Sim ulation examples are pr esented to illustrate the effectiveness of the results. Keyw ords : attitude synchronization, distr ibuted control, adaptive control, multi-agent system . 1 In tro duc tion In recen t yea rs , consensus and co op erativ e control of multi-v ehicle systems ha ve attracted com- p elling atten tion from v arious scientific comm unities. A large b o dy of theoretical adv ances has b een r ep orted, see [9, 8 , 11, 13, 14, 10 ] and references th er ein. In the aforemen tioned works, the agen t dyn amics are restricted to b e a single, d ou b le integ rators or linear systems. The results prop osed in th ese pap ers b ecome quite limited when dealing with the attitude synchronizatio n problem of multiple spacecraft, wh ic h is more c hallenging than the consensu s of v ehicles w ith in tegrator dynamics, due to the nonlinearity of the attitude dyn amics. A ttitude con trol of a single r igid b o dy has b een extensiv ely stu died, e.g., in [22, 20, 2, 23]. A leader-follo w er strategy is pr op osed in [21] for attitude sync hronization of multiple s p acecraft. Decen tralized con trol la ws using the b eha vioral appr oac h are p resen ted for attitude synchro- nization in [15, 7], where the comm un ication top ology among spacecraft is assumed to b e a bidirectional ring. Adaptiv e consensu s proto cols are prop osed in [3] for multiple manipulators with uncertain dynamics. Co op erativ e attitude cont rol of m ultiple rigid b o dies with a leader- follo w er communicatio n top olog y is considered in [5]. In [4], contract ion analysis theory is used to deriv e attitude syn c hronization strategies with global exp onen tial con verge nce for a group of spacecraft with a bidir ectional comm un ication top ology . Distributed cont rol la ws without v elo cit y measur emen ts are stu d ied for attitude sync h r onization of m ultiple spacecraft in [1 ] by use of qu aternion r epresen tation w hile in [17] by use of Mo d ified Ro driguez Paramete rs (MRPs) for attitude r epresen tation. The resu lts in [1, 17] are applicable to general undirected comm un i- cation top ologies. T he distributed attitude tracking pr oblem is addressed in [16] for sp acecraft whose inf ormation exchange graph can b e simplified to a graph with only one n o de. Motiv ated b y [17, 4, 3], this pap er concerns the distributed adaptive attitude synchronizatio n ∗ Zhongkui Li is with the Sch o o l of Automation, B eijing Institute of T ec hnology , Beijing 1 00081 , P . R. China (E-mail: zhongkli@g mail.com). Zhisheng Duan is with with State Key Lab for T urbulence and Complex Sys tems, Depa rtment of Mechanics and Aerospace Engineering, College o f E ngineering, Peking Univ er sity , B e ijing 100 8 71, P . R. China (E-mail: dua nz s @pku.edu.cn) 1 problem of a group of spacecraft with un kno wn iner tia matrices. The attitude dy n amics are represent ed h ere by MRPs. Tw o distributed adaptiv e controll ers are pr op osed for the cases with and w ithout a virtual leader to whic h a time-v arying reference attitude is assigned. Th e first controll er achiev es attitude sync hron ization for a group of spacecraft with a leaderless comm unication top ology h a ving a directed spannin g tree. The second controll er guaran tees that all spacecraft trac k the reference attitude w hic h is av ailable to only a subset of the spacecraft, if the virtu al leader has a dir ected path to all other spacecraft. Differing from the results giv en in [4] which applies only to a bidirectional ring communicat ion top ology , and those in [3] whic h r equires the comm unication graph to b e undir ected, the comm un ication top ology among the spacecraft is relaxed to a general dir ected graph in this pap er. The r esults obtained here generalize Th eorem 4.1 in [17] to the case where th e attitude dynamics are uncertain and th e comm unication top ology is either leaderless or leader-follo w er. It should b e men tioned th at all the resu lts in this pap er are applicable to rob otic man ip ulators with dyn amics represen ted by the Euler-Lagrange equation. The r est of this pap er is organized as f ollo ws. The attitude dynamics and some usefu l results of the graph theory are in tro d uced in Section 2. The distributed adaptiv e attitude synchronizatio n problem f or the cases without and with a reference attitude are studied in Sections 3 and 4, resp ectiv ely . S im ulation examples are presented to illus trate the theoretical resu lts in Section 5. S ection 6 concludes the p ap er. The f ollo win g notation will b e u sed throughout the p ap er. R n × n denotes the set of all n × n real matrices. I N represent s the iden tit y matrix of dimension N . 1 ∈ R p denotes the vect or with all entries equal to one. Matrices, if not exp licitly stated, are assumed to ha ve compat- ible dimensions. k M k represent s the induced 2-norm of matrix M ∈ R n × m . F or a v ector x = [ x 1 , x 2 , x 3 ] T ∈ R 3 , th e cross-pro du ct op erator is denoted by S ( x ) = 0 − x 3 x 2 x 3 0 − x 1 − x 2 x 1 0 . diag( A 1 , · · · , A n ) represent s a b lo c k-diagonal matrix with matrices A i , i = 1 , · · · , n, on its d iag- onal. A ⊗ B d enotes the Kr onec k er pro d uct of matrices A and B . 2 Preliminaries and Problem F orm ula tion This pap er considers the attitude synchronizatio n p r oblem of a n et w ork of N spacecraft. Mo d- ified Ro driguez Paramete rs (MRPs) are used here to rep resen t the attitude of the spacecraft with resp ect to th e inertial frame. T he MRP vect or σ i ∈ R 3 for the i -th spacecraft is defin ed b y σ i = ˆ e i tan( φ i 4 ), where ˆ e i is the E u ler axis and φ i is the Euler angle [18]. T he attitude dynamics of the i -th spacecraft are give n b y [20] J i ˙ ω i = − S ( ω i ) J i ω i + u i , ˙ σ i = G ( σ i ) ω i , i = 1 , 2 , · · · , N , (1) 2 where ω i ∈ R 3 denotes the angular v elo cit y in th e b od y-fixed frame, J i ∈ R 3 × 3 is the inertia matrix, u i ∈ R 3 is the con trol torqu e, and G ( σ i ) = 1 2 1 − σ T i σ i 2 I 3 − S ( σ i ) + σ i σ T i . F ollo wing [19, 23], (1) can b e rewritten as H ∗ i ( σ i ) ¨ σ i + C ∗ i ( σ i , ˙ σ i ) ˙ σ i = G − T ( σ i ) u i , i = 1 , 2 , · · · , N , (2) where H ∗ i ( σ i ) , G − T ( σ i ) J i G − 1 ( σ i ) , C ∗ i ( σ i , ˙ σ i ) , G − T ( σ i ) J i G − 1 ( σ i ) ˙ G ( σ i ) G − 1 ( σ i ) − G − T ( σ i ) S ( J i G − 1 ( σ i ) ˙ σ i ) G − 1 ( σ i ) . It is assumed that the in er tia matrices J i , i = 1 , 2 , · · · , N , are unkn o wn constan t p ositiv e- definite matrices. Und er this assumption, the attit ud e dynamics (2) h as the follo wing p rop erties: Prop ert y 1 . Matrix H ∗ i ( σ i ) is symmetric and p ositiv e definite. Prop ert y 2 . Matrix ˙ H ∗ i ( σ i ) − 2 C ∗ i ( σ i , ˙ σ i ) is ske w symmetric, i.e., x T ( ˙ H ∗ i ( σ i ) − 2 C ∗ i ( σ i , ˙ σ i )) x = 0 , ∀ x ∈ R 3 . Prop ert y 3 . The attitude d ynamics (2) satisfies the f ollo wing linear parameterization condi- tion: H ∗ i ( σ i ) ¨ y + C ∗ i ( σ i , ˙ σ i ) ˙ y = Y ( σ i , ˙ σ i , ˙ y , ¨ y ) θ i , ∀ y ∈ R 3 , where Y ∈ R 3 × 6 is called the regression matrix and θ i = h J i 11 J i 12 J i 13 J i 22 J i 23 J i 33 i T (3) is the unkn o wn parameter v ector with J i j k b eing the ( j, k )-th ent ry of the iner tia matrix J i in (1). The comm unication top ology among spacecraft is represented by a dir ected graph G consisting of a n o de set V = { 1 , 2 , · · · , N } and an edge set E ⊂ V ×V . The n o de i denotes the i -th spacecraft. An edge ( i, j ) means that spacecraft j can obtain the attitude information of spacecraft i , but not conv ersely . F or an edge ( i, j ) in the directed graph , i is the p aren t no de, j is the c hild no de, and j is neigh b orin g to i . A graph with th e p r op ert y that ( i, j ) ∈ E implies ( j, i ) ∈ E is said to b e und irected. A path on G from no de i 1 to no de i l is a sequence of ord ered edges of the form ( i k , i k +1 ), k = 1 , · · · , l − 1. A directed graph contai ns a d irected spannin g tree if there exists a no de called th e ro ot, wh ic h has n o parent, such that there exists a directed path from this n o de to eve ry other n o de. The adjacency matrix A ∈ R N × N of graph G is defined as a ii = 0, an d a ij > 0 if ( j, i ) ∈ E but 0 otherwise. Th e Laplacian matrix L ∈ R N × N is defin ed as L ii = P j 6 = i a ij , L ij = − a ij for i 6 = j . Given a matrix R = ( r ij ) p × p , the graph of R is the d irected graph with p no des su c h that there is an edge in the graph from no de j to no de i if and only if r ij 6 = 0 [6]. Lemma 1 [13]. Zero is an eigenv alue of L w ith 1 as the corresp onding righ t eigenv ecto r and all the nonzero eigen v alues ha ve p ositiv e real p arts. F urthermore, zero is a simple eigen v alue of L if and only if the graph has a directed spann in g tree. 3 3 Distributed Ad aptiv e At titude Synchronizati on This section consider s the d istr ibuted adaptive attitude synchronizat ion pr oblem of (1) whose comm unication top ology is represented by a leaderless directed graph G . A graph is leader- less, if eac h no de in this graph has at least one p aren t. Before moving forw ard, the attitude sync hr on ization problem is fi r st defin ed. Definition 1 . The distrib uted adaptiv e attitude sync hron ization problem is said to b e solv ed, if the cont rol la ws u i , i = 1 , 2 , · · · , N , are designed b y using only lo cal information of neighborin g spacecraft suc h that the attitudes of (1) satisfy lim t →∞ k σ i − σ j k = 0, lim t →∞ k ˙ σ i − ˙ σ j k = 0, i, j = 1 , 2 , · · · , N . A t eac h time instan t, the attitude information of other spacecraft a v ailable to spacecraft i is giv en b y σ d i , P N j =1 a ij σ j P N j =1 a ij , i = 1 , 2 , · · · , N , (4) where A = ( a ij ) N × N is the adjacency matrix of the comm u n ication graph G . T o quanti fy whether the attitude synchronizatio n is ac hiev ed or not, a synchronizatio n error e i ( t ) is defin ed as follo ws: e i , σ i − σ d i , i = 1 , 2 , · · · , N . (5) In ad d ition, furth er defin e a fi ltered syn chronizatio n error s i ( t ) as s i , ˙ e i + Λ i e i , i = 1 , 2 , · · · , N , (6) where Λ i ∈ R 3 × 3 , i = 1 , 2 , · · · , N , are constant p ositiv e-definite matrices. In ligh t of (2), (4), (5), and (6), it can b e obtained that vec tor s i ev olv es according to the follo wing dynamics: H ∗ i ( σ i ) ˙ s i + C ∗ i ( σ i , ˙ σ i ) s i = G − T ( σ i ) u i − H ∗ i ( σ i )( ¨ σ d i − Λ i ˙ e i ) − C ∗ i ( σ i , ˙ σ i )( ˙ σ d i − Λ i e i ) , i = 1 , 2 , · · · , N . (7) By Prop ert y 3, the r igh t sid e of the ab o ve equation can b e written in to a linear combinatio n of the inertia v ector θ i , whic h is defined in (3). T o the end , introd u ce a linear op erator L ( a ) for v ector a = [ a 1 , a 2 , a 3 ] T as L ( a ) = a 1 a 2 a 3 0 0 0 0 a 1 0 a 2 a 3 0 0 0 a 1 0 a 2 a 3 , and a linear op erator F ( x, v ) for vec tors x = [ x 1 , x 2 , x 2 ] T , v = [ v 1 , v 2 , v 3 ] T as F ( x, v ) = 0 x 1 v 3 − x 1 v 2 x 2 v 3 − x 2 v 2 + x 3 v 3 − x 3 v 2 − x 1 v 3 − x 2 v 3 x 1 v 1 − x 3 v 3 0 x 2 v 1 x 3 v 1 x 1 v 2 − x 1 v 1 + x 2 v 2 x 3 v 2 − x 2 v 1 − x 3 v 1 0 . It can b e v erified that op erators L ( s ) and F ( x, v ) satisfy J i a = L ( a ) θ i , S ( J i x ) v = F ( x, v ) θ i . (8) 4 Therefore, by u s ing (8), (7) can b e written as H ∗ i ( σ i ) ˙ s i + C ∗ i ( σ i , ˙ σ i ) s i = G − T ( σ i ) u i − Y i ( σ i , ˙ σ i , ˙ σ d i − Λ i e i , ¨ σ d i − Λ i ˙ e i ) θ i , i = 1 , 2 , · · · , N , (9) where Y i ( σ i , ˙ σ i , ˙ σ d i − Λ i e i , ¨ σ d i − Λ i ˙ e i ) = G − T ( σ i ) L ( G − 1 ( σ i )( ¨ σ d i − Λ i ˙ e i )) + L ( G − 1 ( σ i )( ˙ σ d i − Λ i e i )) + F ( G − 1 ( σ i ) ˙ σ i , G − 1 ( σ i )( ˙ σ d i − Λ i e i )) Since the inertia parameter θ i is u nknown, its estimate ˆ θ i is u sed ins tead to construct th e con troller u i to sp acecraft i as follo ws: u i = G T ( σ i ) Y i ( σ i , ˙ σ i , ˙ σ d i − Λ i e i , ¨ σ d i − Λ i ˙ e i ) ˆ θ i − K i s i , i = 1 , 2 , · · · , N , (10) where K i ∈ R 3 × 3 , i = 1 , 2 , · · · , N , are p ositiv e definite. The p arameter estimate v ector ˆ θ i is generated by the follo wing adaptive up dating la w: ˙ ˆ θ i = − Γ i Y T i ( σ i , ˙ σ i , ˙ σ d i − Λ i e i , ¨ σ d i − Λ i ˙ e i ) s i , i = 1 , 2 , · · · , N , (11) where Γ i ∈ R 6 × 6 , i = 1 , 2 , · · · , N , are p ositiv e-definite d iagonal m atrices. Define the estimation errors ˜ θ i = θ i − ˆ θ i , i = 1 , 2 , · · · , N . Th en, substituting (10), (11) in to (9) giv es H ∗ i ( σ i ) ˙ s i + C ∗ i ( σ i , ˙ σ i ) s i = − Y i ( σ i , ˙ σ i , ˙ σ d i − Λ i e i , ¨ σ d i − Λ i ˙ e i ) ˜ θ i − K i s i , i = 1 , 2 , · · · , N . (12) Theorem 1 . If the leaderless communicatio n graph G has a directed spann ing tree, then distributed con trollers (10) and adaptiv e up dating la ws (11) solv es the attitude sync hr onization problem for (1). Pro of . Let e ( t ) = [ e T 1 , · · · , e T N ] T and σ ( t ) = [ σ T 1 , · · · , σ T N ] T . Th en, (5) can b e w ritten as e = M L σ, (13) where L is the Lap lacian matrix asso ciated with graph G , and M = diag( P N j =1 a 1 j , · · · , P N j =1 a N j ). Since graph G is leaderless and has a directed spanning tree, one obtains 1) there exists at least one nonzero entry for eac h row of the adjacency matrix A , thus matrix M is p ositiv e d efinite; 2) the Laplacian matrix L h as a simple eigen v alue 0 with 1 as the corresp onding eigen v ector, and the other eigen v alues hav e p ositive real parts. Then, it follo ws from (13) that e = 0 if and only if σ 1 = σ 2 = · · · = σ N . That is, the attitude synchronizati on problem is s olved if and only if e ( t ) → 0, ˙ e ( t ) → 0, as t → ∞ . Consider the follo wing L y apunov function candidate V ( t ) = 1 2 N X i =1 s T i H ∗ i ( σ i ) s i + N X i =1 ˜ θ T i Γ − 1 i ˜ θ i ! . (14) 5 By (12), (11), and Prop erty 2, the time deriv ativ e of V ( t ) is ˙ V ( t ) = N X i =1 s T i ˙ H ∗ i ( σ i ) s i + H ∗ i ( σ i ) ˙ s i + N X i =1 ˙ ˜ θ T i Γ − 1 i ˜ θ i = N X i =1 s T i ˙ H ∗ i ( σ i ) s i − C ∗ i ( σ i , ˙ σ i ) − Y i ( σ i , ˙ σ i , ˙ σ d i − Λ i e i , ¨ σ d i − Λ i ˙ e i ) ˜ θ i − K i s i − N X i =1 ˙ ˆ θ T i Γ − 1 i ˜ θ i = − N X i =1 s T i Y i ( σ i , ˙ σ i , ˙ σ d i − Λ i e i , ¨ σ d i − Λ i ˙ e i ) ˜ θ i + ˙ ˆ θ T i Γ − 1 i ˜ θ i + s T i K i s i = − N X i =1 s T i K i s i ≤ 0 . (15) Let S = { ( σ i , s i , ˜ θ i ) | ˙ V = 0 } . No te that ˙ V = 0 implies that s i = 0, i = 1 , 2 , · · · , N . By LaSalle’s in v ariance principle [19], it follo ws from that s i → 0, i = 1 , 2 , · · · , N , as t → ∞ , which b y (6) in turn sh o ws that e ( t ) → 0, ˙ e ( t ) → 0, as t → ∞ , i.e, attitude synchronizati on is ac hiev ed. Remark 1 . It should b e n oted that the controlle r (10) to spacecraft i dep ends only on its o wn attitude v ectors σ i , ˙ σ i , ¨ σ i , and the attitudes of its neigh b orin g sp acecraft, therefore is distribu ted. Theorem 1 giv es a sufficien t condition for ac hieving attitude s ync hronization. Ho w ev er, it is generally quite hard to expressly d eriv e the final syn c hronized attitude v alue, whic h dep ends on the initial attitudes of the N spacecraft, matrices Λ i , K i , i = 1 , 2 , · · · , N , and the comm unication top ology G . 4 Distributed Ad aptiv e At titude T rac king Differen t fr om the leaderless communication graph discussed as in the ab o ve section, the sp ace- craft’ attitudes ma y b e desired to follo w a given time-v arying reference attitude σ r in certain circumstance. It is sup p osed that σ r is a v aila ble to only a s u bgroup of the spacecraft, other- wise co op eration b etw een neigh b oring spacecraft by exchanging attitude in formation b ecome not so necessary . Assume that σ r , ˙ σ r , and ˙ σ r are all b ounded. F or this case, the attitude sync hr on ization p roblem is called attitude tr acking p roblem in [4, 17], which is form ulated as follo ws. Definition 2 . The d istributed adaptiv e attitude trac king p roblem is said to b e solv ed, if the lo cal con trol la ws u i , i = 1 , 2 , · · · , N , are designed for (1) su c h that lim t →∞ k σ i − σ r k = 0, lim t →∞ k ˙ σ i − ˙ σ r k = 0, i = 1 , 2 , · · · , N . T ak e the reference attitude σ r as the attitude of a virtu al leader, lab eled as spacecraft N + 1. Since the vir tual leader d o es not obtain an y in f ormation fr om the N spacecraft, the communi- cation top ology among these N + 1 spacecraft (the N sp acecraft and the virtual leader) is in the leader-follo w er f orm . 6 Assume that the comm un ication top ology among the N spacecraft is still denoted by G . The attitude inf ormation of other spacecraft a v aila b le to spacecraft i is giv en by σ d f i , P N j =1 a ij σ j + a i ( N +1) σ r P N j =1 a ij + a i ( N +1) , i = 1 , 2 , · · · , N , (16) where A = ( a ij ) N × N is the adjacen t matrix of G , a i ( N +1) > 0, i = 1 , · · · , N , if spacecraft i has access to the virtual leader and a i ( N +1) = 0 otherw ise. Similar to the ab o ve s ection, a sync hr on ization error e f i ( t ) is defin ed as follo ws: ˙ e f i = σ f i − σ d f i , i = 1 , 2 , · · · , N . ( 17) Corresp ond ingly , the fi ltered synchronizatio n errors s f i is defin ed as s f i , ˙ e f i + b Λ i e f i , i = 1 , 2 , · · · , N , (18) where matrices b Λ i ∈ R 3 × 3 , i = 1 , 2 , · · · , N , are p ositiv e definite. By (2), (16), (17), and Prop ert y 3, vect or s f i satisfies the f ollo wing dynamics: H ∗ i ( σ i ) ˙ s f i + C ∗ i ( σ i , ˙ σ i ) s f i = G − T ( σ i ) u i − Y i ( σ i , ˙ σ i , ˙ σ d f i − b Λ i e f i , ¨ σ d f i − b Λ i ˙ e f i ) θ i , i = 1 , 2 , · · · , N . (19) The d istributed con trollers u i , i = 1 , 2 , · · · , N , to the N spacecraft are pr op osed as u i = G T Y i ( σ i , ˙ σ i , ˙ σ d f i − b Λ i e f i , ¨ σ d f i − b Λ i ˙ e f i ) ˆ θ f i − b K i s f i , i = 1 , 2 , · · · , N , (20) where b K i ∈ R 3 × 3 , i = 1 , 2 , · · · , N , are p ositiv e definite and ˆ θ f i is the estimate of θ i , generated b y the follo wing adaptiv e up dating la w: ˙ ˆ θ f i = − b Γ i Y T i ( σ i , ˙ σ i , ˙ σ d f i − b Λ i e f i , ¨ σ d f i − b Λ i ˙ e f i ) s f i , i = 1 , 2 , · · · , N , (21) where b Γ i ∈ R 6 × 6 , i = 1 , 2 , · · · , N , are p ositiv e-definite d iagonal m atrices. Theorem 2 . Denote by b G N +1 the directed grap h of matrix A N +1 = " A b 0 0 # , wh ere b = [ a 1( N +1) , · · · , a N ( N +1) ] T . If graph b G N +1 has a spannin g tree with n o de N + 1 as the ro ot, then distributed con trollers (20) and adaptiv e up dating la ws (21) solv e the attitude trac king problem for the N spacecraft in (1). Pro of . Let σ N +1 , σ r , ˆ σ ( t ) = [ σ T 1 , · · · , σ T N , σ T N +1 ] T , and e f ( t ) = [ e T f 1 , · · · , e T f N , 0] T . Th en, (17) can b e written as e f = c M b L ˆ σ , (22) where c M = diag( P N j =1 a 1 j , · · · , P N j =1 a N j , 1), and b L = ( b L ij ) ( N +1) × ( N +1) is th e Laplacian matrix of graph b G , defin ed as b L ii = P N +1 j =1 a ij , b L ij = − a ij ( j 6 = i ), ∀ i ∈ { 1 , 2 , · · · , N } , and b L ( N +1) j = 0, ∀ j ∈ { 1 , 2 , · · · , N + 1 } . Under the assu mption of the theorem, matrix c M is p ositiv e definite and 0 is a simple eigen v alue of matrix b L with 1 as the corresp ondin g eigen v ector, implying that e f = 0 if and only if σ 1 = σ 2 = · · · = σ N = σ r . That is, the distribu ted attitude trac king problem is solv ed if and only if e f ( t ) → 0, ˙ e f ( t ) → 0, as t → ∞ . 7 Consider the follo wing L y apunov function candidate b V ( t ) = 1 2 N X i =1 s T f i H ∗ i ( σ i ) s f i + N X i =1 ( θ i − ˆ θ f i ) T b Γ − 1 i ( θ i − ˆ θ f i ) ! . (23) The time deriv ativ e of b V ( t ) can b e obtained as ˙ b V ( t ) = N X i =1 s T f i ˙ H ∗ i ( σ i ) s f i + H ∗ i ( σ i ) ˙ s f i − N X i =1 ˙ ˆ θ T f i b Γ − 1 i ( θ i − ˆ θ f i ) = − N X i =1 s T f i b K i s f i . (24) Since b V ( t ) ≥ 0, ˙ b V ( t ) ≤ 0, b V ( t ) remains b oun ded, w hic h b y (23) implies that s f i , ˜ θ f i , i = 1 , 2 , · · · , N , are b oun ded. By u s ing standard signal c hasing arguments, it is easy to sho w that ˙ s f i , i = 1 , 2 , · · · , N , are b oun ded. Therefore, ¨ b V ( t ) = − 2 P N i =1 ˙ s T f i b K i s f i is b oun ded. I n light of Barbalat’s lemma [19], ˙ b V ( t ) → 0, as t → ∞ . Thus, s i → 0, i = 1 , 2 , · · · , N , as t → ∞ , whic h by (17) sho ws that e f ( t ) → 0, ˙ e f ( t ) → 0, as t → ∞ , i.e, the distributed attitude trac king p roblem is solv ed. Remark 2. Theorems 1 and 2 pr esent sufficient conditions f or the adaptive attitude syn- c hronization of multiple spacecraft ha ving general dir ected communicati ons in the p r esence of unknown inertia m atrices, for b oth the cases with an d withou t a reference attitude. By con trast, the results giv en in [4] are applicable only to a bidirectional ring comm unication top ology , and the result in [3] requires the communication graph to b e u ndirected. Theorems 1 and 2 gen- eralize Theorem 4.1 in [17] to the case wh ere the attitude dynamics (1) are uncertain and the comm unication top ology is either leaderless or leader-follo w er. It should b e n oted that differen t from Theorem 1, Barbalat’s lemma is utilized to derive Theorem 2, d ue to the f act th at the time-v aryin g reference attitude σ r ma y render the closed-lo op s y s tem nonautonomous. 5 Numerical Examples In this section, the effectiv eness of the prop osed con trol la ws is illus trated through numerical sim ulations. 1 6 2 5 3 4 Figure 1: Th e comm un ication top ology . 8 Consider a group of six sp acecraft, wh ose inertia matrices are sh o wn in T able 1 [15]. The initial attitude states σ i (0), ω i (0), i = 1 , 2 , · · · , 6, are c hosen r andomly . The communicati on top ology is giv en b y Fig. 1, s o the corresp ondin g adjacency matrix is A = 0 0 0 1 1 1 1 0 0 0 0 0 1 1 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 . F or (10) and (20), tak e matrices Λ i = b Λ i = I 3 , K i = b K i = 3 I 3 , Γ i = b Γ i = 3 I 6 , i = 1 , 2 , · · · , 6. Th e parameter estimates ˆ θ i and ˆ θ f i are in itialized to b e zero, i.e., ˆ θ i (0) = 0, ˆ θ f i (0) = 0, i = 1 , 2 , · · · , 6, in (11), (21). F or sim p licit y , let the referen ce attitude σ r = [0 . 1 , 0 . 3 , 0 . 5] T . Su p p ose that σ r is a v aila ble only to spacecraft 1. In this case, a 17 = 1, a i 7 = 0, i = 2 , · · · , 6. J 1 [1 , 0 . 1 , 0 . 1; 0 . 1 , 0 . 1 , 0 . 1; 0 . 1 , 0 . 1 , 0 . 9] kgm 2 J 2 [1 . 5 , 0 . 2 , 0 . 3; 0 . 2 , 0 . 9 , 0 . 4; 0 . 3 , 0 . 4 , 2 . 0] kgm 2 J 3 [0 . 8 , 0 . 1 , 0 . 2; 0 . 1 , 0 . 7 , 0 . 3; 0 . 2 , 0 . 3 , 1 . 1] kgm 2 J 4 [1 . 2 , 0 . 3 , 0 . 7; 0 . 3 , 0 . 9 , 0 . 2; 0 . 7 , 0 . 2 , 1 . 4] kgm 2 J 5 [0 . 9 , 0 . 15 , 0 . 3; 0 . 15 , 1 . 2 , 0 . 4; 0 . 3 , 0 . 4 , 1 . 2] kgm 2 J 6 [1 . 1 , 0 . 35 , 0 . 45; 0 . 35 , 1 . 0 , 0 . 5; 0 . 45 , 0 . 5 , 1 . 3] kgm 2 T able 1: Sp acecraft sp ecificati ons. Figs. 2(a), 2(b), and 2(c) depict, resp ectiv ely , the attitudes, angular v elo cities, and control torques of the six spacecraft with (10) and (11), from which it can b e obs erv ed that attitude sync hr on ization is in d eed ac hieved. T he parameter estimates ˆ θ i , i = 1 , 2 , · · · , 6, are shown in Fig. 3. Figs. 4(a), 4(b), 4(c), an d 5 depict, resp ectiv ely , the attitudes, angular velocities, con trol torques, and the p arameter estimates ˆ θ f i , i = 1 , 2 , · · · , 6, of the six spacecraft with (20) and (21). 6 Conclusions This pap er has ad d ressed the distr ib uted adaptiv e attitude sync hr onization problem of a grou p of spacecraft with unknown inertia m atrices. Tw o distrib uted adaptiv e con trollers h a v e b een prop osed for the cases with and without a virtual leader to w hic h a time-v arying reference atti- tude is assigned. Th e first control ler ac hieve s attitude synchronizatio n for a group of spacecraft with a leaderless communicatio n top ology ha ving a directed spanning tree. The second con troller guaran tees that all spacecraft trac k the r eferen ce attitude if the virtual leader has a d irected path to all other spacecraft. Th is pap er has extended some existing results in the literature. An in teresting topic for fu ture research is th e distributed adaptiv e attitude s ync hronization of m ultiple spacecraft without v elo cit y measuremen ts. 9 0 10 20 30 40 50 −2 0 2 t (s) σ j (1) 0 10 20 30 40 50 −0.5 0 0.5 t (s) σ j (2) 0 10 20 30 40 50 −2 0 2 t (s) σ j (3) (a) Attitudes 0 10 20 30 40 50 −0.5 0 0.5 t (s) ω j (1) 0 10 20 30 40 50 −1 0 1 t (s) ω j (2) (rad/s) 0 10 20 30 40 50 −0.5 0 0.5 t (s) ω j (3) (b) Angular velocities 0 10 20 30 40 50 −0.5 0 0.5 t (s) τ j (1) 0 10 20 30 40 50 −1 0 1 t (s) τ j (2) 0 10 20 30 40 50 −0.5 0 0.5 t (s) τ j (3) (c) Control torq ues Figure 2: A ttitudes, angular ve lo cities, and con trol torques of (1) w ith con troller (10) and adaptiv e la w (11). 0 10 20 30 40 50 −1 0 1 t θ j (1) 0 10 20 30 40 50 −0.5 0 0.5 t (s) θ j (2) 0 10 20 30 40 50 −0.5 0 0.5 t (s) θ j (3) (a) ˆ θ i , i = 1 , 2 , 3 0 10 20 30 40 50 0 0.5 1 t (s) θ j (4) 0 10 20 30 40 50 −0.5 0 0.5 t (s) θ j (5) 0 10 20 30 40 50 0 0.5 1 t (s) θ j (6) (b) ˆ θ i , i = 4 , 5 , 6 Figure 3: Paramet er estimates of (11). 10 0 50 100 150 200 −0.5 0 0.5 t (s) σ j (1) 0 50 100 150 200 −1 0 1 t (s) σ j (2) 0 50 100 150 200 −1 0 1 t (s) σ j (3) (a) Attitudes 0 50 100 150 200 −0.5 0 0.5 t (s) ω j (1) 0 50 100 150 200 −0.5 0 0.5 t (s) ω j (2) (rad/s) 0 50 100 150 200 −1 0 1 t (s) ω j (3) (b) Angular velocities 0 50 100 150 200 −0.5 0 0.5 t (s) τ j (1) 0 50 100 150 200 −0.5 0 0.5 t (s) τ j (2) 0 50 100 150 200 −0.5 0 0.5 t (s) τ j (3) (c) Control torq ues Figure 4: A ttitudes, angular v elo cit y , and con trol torques of (1) with con troller (20) and adaptiv e la w (21). 0 50 100 150 200 −1 0 1 t θ j (1) 0 50 100 150 200 −1 0 1 t (s) θ j (2) 0 50 100 150 200 −1 0 1 t (s) θ j (3) (a) ˆ θ f i , i = 1 , 2 , 3 0 50 100 150 200 −1 0 1 t (s) θ j (4) 0 50 100 150 200 −1 0 1 t (s) θ j (5) 0 50 100 150 200 −1 0 1 t (s) θ j (6) (b) ˆ θ f i , i = 4 , 5 , 6 Figure 5: Paramet er estimates of (21). 11 References [1] A. Ab dessameud and A. T a y ebi, “A ttitude sy n c hronization of a group of s pacecraft without v elo cit y measuremen ts,” IEEE T r ansactio ns on Autom atic Contr ol , v ol. 54, no. 11, pp . 2642- 2648, 2009. [2] M. R. Akella , “Rigid b o dy attitude trac king without angular v elo cit y feedback, ” Systems and Contr ol L etters , vo l. 42, no. 4, pp. 321-326 , 2001. [3] L. Cheng, Z. G. Hou, and M. T an, “Decen tralized ad ap tive consensus control for m ulti- manipulator sys tem w ith un certain dynamics,” in Pr o c e e dings of IEEE International Con- fer enc e on Systems, M an, and Cyb ernetics 2008 , pp. 2712-2717 . [4] S. J. Chung, U. Ahsun, and J.-J. E. Slotine, “Application of syn c hronization to formation flying spacecraft: Lagrangian app roac h,” Journal of Guidanc e, Contr ol, and Dynamics, vol. 32, no. 2, pp. 512-526, 2009. [5] D. V. Dimarogonas, P . Tsiotras, and K. J. Kyriak op oulos, “Leader-follo w er co op erativ e attitude con trol of multiple rigid b o d ies,” Systems and Contr ol L etters , v ol. 58, n o. 6, pp . 429-4 35, 2009. [6] R. A. Horn and C. R. Johnson, M atrix Ana lysis . Cam bridge, UK: Cambridge Un iv ersit y Press, 1985. [7] J. R. L a wton and R. W. Beard, “Synchronize m ultiple sp acecraft rotations,” Auto matic a , v ol. 38, n o. 8, pp . 1359- 1364, 2002. [8] Z. K. Li, Z . S . Duan, and L. Huang, “ H ∞ con trol of netw ork ed multi-age nt systems,” Journal of Systems Scienc e and Complexity , vol . 22, no. 1, pp. 35-48, 2009. [9] Z. K. Li, Z. S . Duan, G. R. Chen, and L. Huang, “Consensus of multiage nt systems and sync hr on ization of complex net works: A u nified viewp oint ,” IE EE T r ansactions on Cir cuits and Systems I: R e gular Pap ers, v ol. 57, no. 1, p p . 213-22 4, 2010. [10] P . L in and Y. Jia, “Distribu ted robust H ∞ consensus con trol in dir ected netw orks of agents with time-dela y ,” Systems and Contr ol L etters , v ol. 57, no. 8, pp. 643–6 53, 2008. [11] R. Olfati-Sab er and R. M. Murr a y , “Consensus p roblems in net works of agen ts with switc h- ing top ology an d time-dela ys,” IE EE T r ansactions on Automat ic Contr ol , vo l. 49, no. 9, pp. 1520–153 3, 2004. [12] W. Ren and R. W. Beard, “Decen tralized scheme for spacecraft form ation flying via the virtual stru cture app roac h,” Journal of Guidanc e , Contr ol, and Dynamics, v ol. 27, no. 1, pp. 73-82, 2004. [13] W. Ren an d R. W. Beard, “Cons en sus seeking in multiage nt sys tems und er dyn amically c hanging in teraction top ologies,” IEEE T r ansactions on Automatic Contr o l , v ol. 50, no. 5, pp. 655-661, 2005. 12 [14] W. Ren, R. W. Beard, and E. M. Atkins. “Information consensu s in multiv ehicle coop erative con trol,” IEEE Contr ol Systems Magazine , v ol. 27, no. 2, p p. 71-82, 2007. [15] W. Ren, “Distributed attitude alignmen t in s p acecraft formation fl ying,” International Journal of A dap tive Contr ol and Signal Pr o c essing , v ol. 21, no. 2-3, p p. 95-113, 2007. [16] W. Ren, “F ormation ke eping and attitude alignmen t for multiple spacecraft through lo cal in teractions, Journal of Guidanc e, Contr ol, and Dynamics, vol. 30, no. 2, pp . 633 -638, 2007. [17] W. Ren, “Distributed co op erativ e attitude sync hr onization and tracking for m ultiple rigid b o dies,” IEEE T r ansactions on Contr ol Systems T e chnolo gy , v ol. 18, no. 2, pp . 383-392, 2010. [18] M. D. Shuster, “A su rv ey of attitude r epresen tation,” Journal of Astr onautic a l Scienc es , v ol. 41, n o. 4, pp . 439-5 17, 1993. [19] J.-J. E. Slotine and W. Li, Applie d Nonline ar Contr ol . Englew o o d C liffs, New J ersey: P r en- tice Hall, 1991. [20] P . Tsiotras, “F u rther passivit y resu lts for the atti tud e con trol problem,” IEEE T r ansactions on Automatic Contr ol , v ol. 43, no. 11, pp . 1597-1 600, 1998. [21] P . W ang, F. Y. Hadaegh, and K. Lau , “Synchronized formation rotation and attitude control of multiple fr ee-flying spacecraft,” Journal of Guidanc e, Contr ol, and Dynamics , vol. 22, no. 1, pp. 1582-1 589, 1999. [22] J. T.-Y. W en and K. Kreutz-Delgado, “Th e attitude con trol p r oblem,” IEEE T r ansactions on Automatic Contr ol , v ol. 36, no. 10, pp . 1148-1 162, 1991. [23] H. W ong, M. S. de Queiroz, and V. K apila, “Adaptive trac king con trol u s ing synt hesized v elo cit y from attitude measurements,” Autom atic a , v ol. 37, no. 6, pp . 947-953, 2001. 13
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment