Dissolution of traffic jam via additional local interactions
We use a cellular automata approach to numerically investigate traffic flow patterns on a single lane. The free-flow phase (F), the synchronized phase (S), and the jam phase (J) are observed and the transitions among them are studied as the vehicular density $\rho$ is slowly varied. If $\rho$ is decreased from well inside the J phase, the flux $\Phi$ follows the lower branch of the hysteresis loop, implying that the adiabatic decrease of $\rho$ is not an efficient way to put the system back into S or F phases. We propose a simple way to help the system to escape out of J phase, which is based on the local information of the velocities of downstream vehicles.
💡 Research Summary
The paper investigates traffic flow on a single lane using a cellular automaton (CA) model that incorporates two realistic ingredients: (i) limited acceleration and deceleration capabilities, and (ii) a binary driver over‑reaction variable γ that switches between an optimistic (γ = 0) and a defensive (γ = 1) driving mode. The model follows the framework of Kerner‑Klenov‑Wolf and Nagel‑Schreckenberg extensions, with a time step Δt = 1 s, cell length Δx = 1.5 m, and a maximum speed v_max = 20 cells (≈108 km/h). Drivers become optimistic when the speeds of the two vehicles ahead are non‑decreasing and the second‑ahead vehicle is fast enough; otherwise they become defensive. This simple rule captures human over‑reaction while keeping the dynamics tractable.
Simulations are performed on a periodic road of length L = 40 000 cells (≈60 km). Starting from a low density (ρ = 10 veh/km), the density is increased very slowly by inserting a vehicle at the largest gap; conversely, density is decreased by removing the vehicle with the smallest headway. After discarding an initial transient of 30 000 steps, the average speed v_avg and flux Φ = ρ v_avg are measured. As ρ grows, the fundamental diagram shows three distinct phases: free flow (F) with linear Φ‑ρ, a synchronized flow (S) where speeds become correlated without stop‑and‑go, and finally a jammed phase (J) at high density. When ρ is subsequently reduced from deep inside the jam, the system follows the lower branch of the hysteresis loop, indicating that a jam does not dissolve simply by lowering density—an effect well known in empirical traffic.
To break this hysteresis, the authors propose a local, downstream‑information‑based control rule. If the m‑th vehicle ahead of a driver is moving slower than a threshold speed v_th, the driver’s γ is forced to 1 (defensive), causing the driver to increase the safety gap. Systematic scans reveal that setting v_th = 8 cells (≈43 km/h) and choosing m in the range 10–30 yields the fastest jam dissolution. An alternative formulation uses a geometric distance d: if any vehicle within distance d downstream moves slower than v_th, the driver becomes defensive. Values of d up to 50 cells (≈75 m) work similarly. The jam disappears reliably when at least about 80 % of vehicles obey this rule.
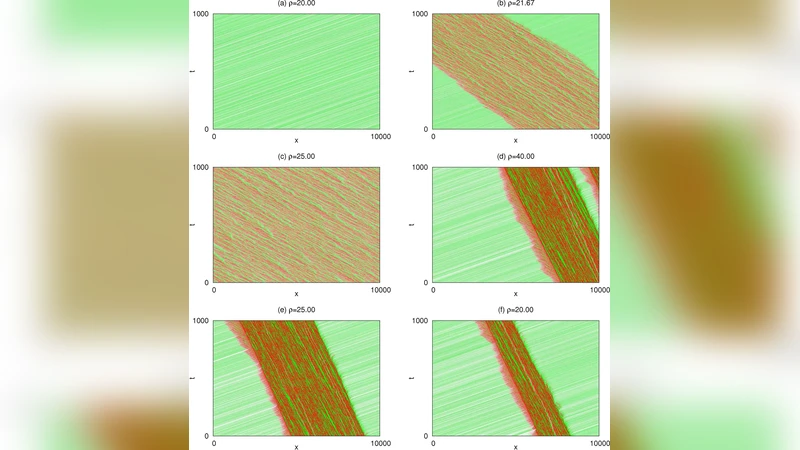
Spatio‑temporal (x‑t) plots illustrate the mechanism: defensive drivers accumulate at the upstream jam front, the jammed region narrows, and eventually the upstream and downstream jam fronts meet, erasing the jam. After the intervention, average speeds rise to ≈50 km/h and the flux on the lower branch matches or exceeds the upper‑branch values for densities 20 ≤ ρ ≤ 30 veh/km, effectively eliminating the hysteresis in this range. For densities above ≈31 veh/km the rule can degrade performance, highlighting its limited applicability.
The study contrasts this decentralized approach with a hypothetical centralized control (e.g., restricting vehicle entry when ρ exceeds a critical value). While central control could instantly maximize flow, it is unrealistic in practice. The proposed local rule requires only short‑range speed information, which could be supplied by vehicle‑to‑vehicle (V2V) communication or adaptive cruise control sensors, making it feasible for real‑world deployment. The authors conclude that modest, locally‑based behavioral adjustments can dramatically improve traffic efficiency and resolve jams without costly infrastructure changes, offering a promising direction for future intelligent transportation systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment