Calibration and Optimization of a Very Large Volume Neutrino Telescope using Extensive Air Showers
We report on a simulation study of the calibration potential offered by floating Extensive Air Shower (EAS) detector stations (HELYCON), operating in coincidence with the KM3NeT Mediterranean deep-sea neutrino telescope. We describe strategies in order to investigate for possible systematic errors in reconstructing the direction of energetic muons as well as to determine the absolute position of the underwater detector.
💡 Research Summary
The paper presents a simulation‑based study of a novel calibration strategy for the KM3NeT deep‑sea neutrino telescope using floating Extensive Air Shower (EAS) detector stations called HELYCON. The core idea is to exploit the coincidence of an atmospheric air shower that reaches the sea surface and the high‑energy muon produced in the same shower that penetrates to the underwater detector. By placing three independent HELYCON arrays on floating platforms directly above the neutrino telescope, each equipped with 16 particle detectors (1 m² each) and GPS‑synchronised timing, the authors can reconstruct the shower axis and its impact point at sea level with high precision.
A “simple estimation” method is introduced: the line connecting the centre of a HELYCON platform with the charge‑weighted mean position of the active optical modules (OMs) in the neutrino telescope provides an estimate of the muon direction. Simulations show that requiring at least five detectors to fire and a total collected charge above 25 MIP selects showers whose axis lies on average 44 m from the platform centre; only 0.05 % of selected events are farther than 150 m. This selection yields a zenith‑angle resolution better than 0.7°, essentially free of reconstruction bias.
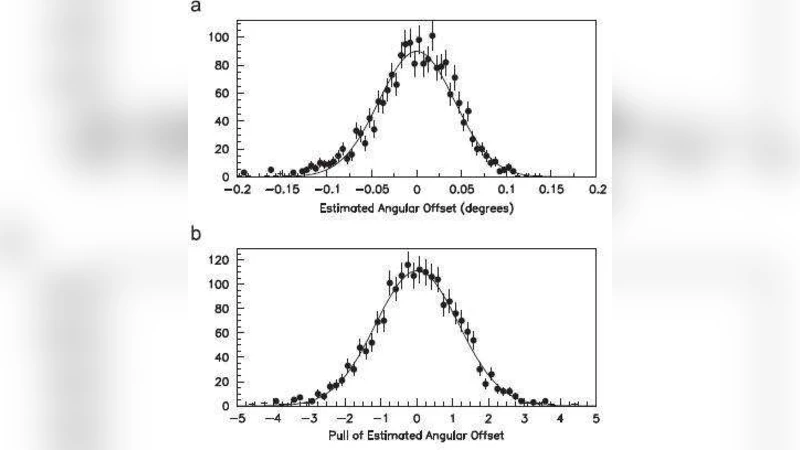
The study uses CORSIKA to generate more than eight million EAS in the energy range 10 TeV–5 PeV, including primaries up to iron. For each shower, the response of the HELYCON arrays is simulated, and the corresponding muon track in the SeaWiet configuration of KM3NeT (300 strings, 20 multi‑PMT OMs per string, 130 m inter‑string spacing, 40 m vertical spacing, depth 3500 m) is fully reconstructed with the HOURS package. The authors compare the simple zenith angle (θ_w) and azimuth angle (φ_w) estimates with the fully reconstructed muon track angles (θ_t, φ_t). The distribution of θ_t − θ_w is centred at zero with a standard deviation of 0.042°, which translates into a sensitivity of 1.1 × 10⁻²° when scaled to the full data set (three arrays operating for ten days). The azimuthal difference (φ_t − φ_w) shows a similar Gaussian core (mean ≈0, σ≈0.10°). Bootstrap resampling of 2000 subsamples (each equivalent to 39 h of data from a single array, ≈1950 events) confirms that the statistical error on the peak position follows a normal distribution with unit pull, validating the error estimates.
Spatial calibration is achieved by examining the coordinates, in the HELYCON reference frame, of the point where the reconstructed muon track intersects the horizontal plane at sea level. Because a systematic shift in the detector’s x–y position mimics a zenith‑angle bias, the authors perform a simultaneous fit of angular and positional offsets using a multivariate least‑squares approach combined with bootstrap error propagation. The resulting sensitivity for the x and y coordinates is better than 1 m.
In summary, the simulation demonstrates that with three floating HELYCON arrays collecting data for ten days, the KM3NeT telescope’s zenith‑angle systematic error can be measured to 0.01°, the azimuthal systematic error to 0.07°, and the absolute detector position to within 1 m. The study does not yet incorporate possible correlations between angular and positional systematics, nor does it model real‑world effects such as platform motion, GPS latency, or water‑optical variations; these will need to be addressed in future experimental deployments. Nonetheless, the results provide a compelling proof‑of‑concept that surface‑based EAS detectors can serve as an effective, low‑cost calibration tool for large‑volume underwater neutrino telescopes, potentially improving the accuracy of astrophysical neutrino source localisation and enhancing the overall scientific reach of the KM3NeT project.
Comments & Academic Discussion
Loading comments...
Leave a Comment