The Darboux transformation of the derivative nonlinear Schr"odinger equation
The n-fold Darboux transformation (DT) is a 2\times2 matrix for the Kaup-Newell (KN) system. In this paper,each element of this matrix is expressed by a ratio of $(n+1)\times (n+1)$ determinant and $n\times n$ determinant of eigenfunctions. Using the…
Authors: Shuwei Xu, Jingsong He, Lihong Wang
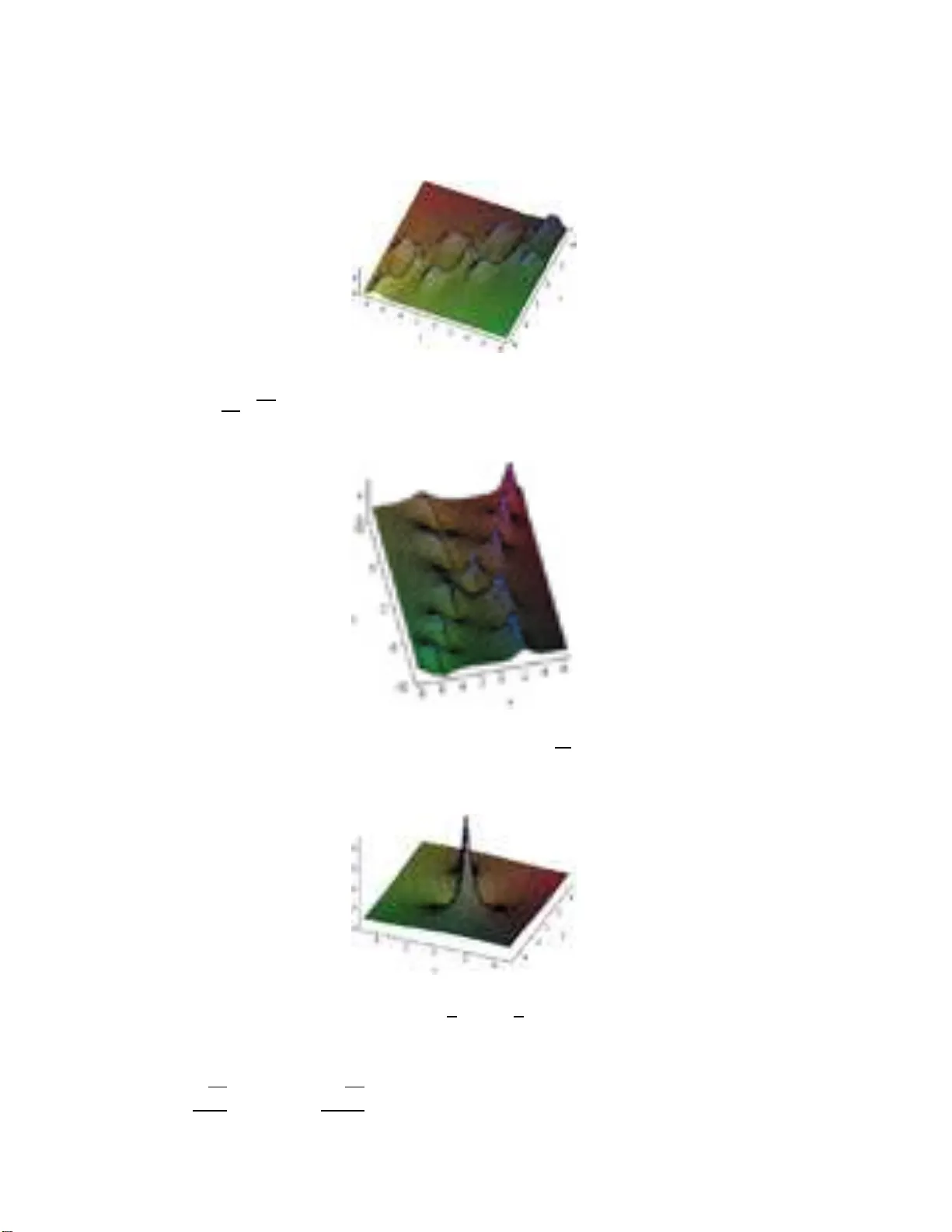
THE D ARBOUX TRANSF ORMA TION OF THE DERIV A TIVE NONLINEA R SCHR ¨ ODINGER EQUA TION SHUWEI XU † ,JINGSONG HE ∗ † , LIHONG W ANG † † Departmen t of Mathematics, Ning b o Univ ersit y , Ningb o , Zhejiang 315211, P . R. China Abstract. The n-fold Darb oux transformation (DT) is a 22 ma trix for the Kaup- Newell (KN) system. In this pap er , each elemen t of this matrix is expressed b y a ra tio of ( n + 1) × ( n + 1) determinant and n × n determinan t of eigenfunctions. Using these formulae, the expressions of the q [ n ] and r [ n ] in KN sys tem ar e gener ated by n-fold DT. F urther , under the reduction condi- tion, the rog ue wav e,rational trav eling so lution, da rk soliton, brig ht soliton, breather solution, per io dic solution of the der iv ativ e no nlinear Sc hr¨ odinger(DNLS) equation are giv en explicitly by differen t seed solutions. In particular, the ro gue wav e and r a tional trav eling solution are t wo kinds o f new solutions. The co mplete classification o f these solutions generated by one-fold DT is g iven in the table on page. Key w ords : deriv ativ e nonlinear Schr¨ odinger equation, Dar b oux transformation, soliton, ratio nal solution, breather solution, rogue w a v e. P A CS(2010) num b ers : 02.30.Ik, 42.81.D p, 52.35.Bj, 5 2.35.Sb, 94.05.F g MSC(2010) n um b ers : 35C08, 37K10, 37K4 0 1. Intro duction The deriv ativ e nonlinear Sc hr¨ odinger equation, iq t − q xx + i ( q 2 q ∗ ) x = 0 , (1) one of the most import a n t in tegrable sys tems in the mathematics and ph ysics, is usually called DNLS(or DNLSI) equation. Here“*” denotes the complex conjugation, and subscript of x (or t ) denotes the pa rtial deriv ative with resp ect to x (or t ). This equation is o riginated from t wo fields of applied ph ysics. The first is plasma ph ysics in whic h the DNLS gov erns the ev o lution of small but finite amplitude Alfv ´ en wa ve s that propagates quasi-parallel to the magnetic field [1, 2]. Recen tly , this eq uation is also us ed to de scrib e large-amplitude magnetoh ydro dynamic (MHD) w a v es in pla smas [3, 4]. F urther, it is natural to impro v e DNLS equation in more practical plasmas. F or example, DNLS truncation mo del [5] and the DNLS with nonlinear La nda u damping [6]. In the s econd area, nonlinear optics, the sub-picosecond or fem tosecond pulses in single-mo de optical fib er is mo deled b y the DNLS [7 – 9]. Ho w ev er, the crucial feature of the DNLS is that the integrabilit y such as the dynamical ev o lution o f the a sso ciated ph ysical system can b e giv en analytically by using its exact solution. Under the v a nishing b oundary condition(VBC), Kaup and Newe ll(KN) [10] firs tly proposed an in v erse scattering transform (IST) with a r evision in their pioneer w orks, and got a one-soliton solution. Later, Kaw ata [11] f urther solv ed DNLS under VBC and non-v anishing boundar y condition (NVBC) to get t w o soliton solution, a nd in tr o duced ”paired soliton” whic h is no w ∗ Corresp o nding author: hejingso ng@nbu.edu.cn,jshe@ustc.edu.cn. 1 regarded as one kind of breather solution. N-soliton formula [12] of the DNLS with VBC is expresse d b y de terminan ts w ith the help of p ole-expansion. F urther, the IST of the DNLS with VBC is re-considered b y Huang’s group [13 – 16] and then the explicit form of the N- soliton is obtained b y some a lgebraic tec hniques. Now w e turn to the DNLS under NVBC , a nd some sp ecial solutions are obtained and the existence o f the algebraic soliton is also give n [17]. This is follow ed b y paired- solito n o f the DNLS from the IST [1 8]. W ada ti etal. [19] hav e giv en the stationary solutions of the DNLS under the plane w a v e b oundary and the contributions of the deriv ativ e term in the DNLS equation. Recen tly , to av oid the m ulti-v alue problem, Chen and Lam [20] revised the IST for the D NLS under NVBC b y in tro ducing an affine parameter, and then got single breather solution, whic h can b e reduced to the dark soltion and brig h t soliton. F urther a pplications on this metho d can b e fo und in reference [21]. Cai and Huang [22] found the action-ang le v ariables of the D NLS explicitly by constructing its Hamiltonian for ma lism. Similar to many usual soliton equations, the DNLS is also solv ed by the Hirota metho d [23 ] and Darb oux transformation(D T) [24, 25] b esides IST. By comparing with the corresp ond- ing results [2 6 – 28] of nonlinear Sc hr¨ o dinger(NLS) equation, the DT [24, 25] of the D NLS has follo wing essen tial distinctness: • the k ernel of one-fold DT is one-dimensional and it can b e define d b y one eigenfunction of linear system defined b y sp ectral problem, • the DNLS will b e in v ariant under one-fold DT asso ciat ed with a pure imaginary eigen- v alue(see the last parag r a ph of the section 2). Some solutions [24] including m ulti-soliton and quasi-p erio dic solutions are obtained b y this DT from a trivial seed: zero solution(or v acuum). Steudel [25] ha s obtained a general formula of solutions q [ N ] and r [ N ] of KN system in terms of V andermonde-lik e determinan ts by N-fold DTs, a nd then giv en n-soliton and N-pha se solutions from z ero see d, N-breather solutions from non-zero seed: mono chromatic w a v e. Unlik e the usual DT, Steduel used solutions of R iccati equations, whic h are transformed from the linear partial differen tial equations of the sp ectral problem for the DNLS, to construct the solutions of the DNLS. So the first difficult y of his metho d is to solv e nonlinear Riccati, whic h is not solv able in general. T o ov ercome this difficult y , Steudel ha v e made an Ansatz(see eq.(51) in r eference [2 5]) a nd in tro duced his fav orite Seahorse functions. Moreo ver, the classification of the solutions(see Figure 1 in reference [25]) g enerated b y DT is v ery in teresting and useful. But the conditions o f parameters to generate dark solito n and brigh t soliton of the DNLS are not clear. Therefore, it is natura l to question whether the difficult Riccati equations are indeed unav oidable for the DT f rom non-zero seed s and whether the classification of solutions generated by one-fold DT can b e fixed thoroughly or not. It is in teresting that the Ablo witz-Kaup-New ell-Segur(AKNS)system [29] can b e mapp ed to the KN system b y a gauge transformation [30]. Moreo v er, there exists other tw o kinds o f deriv ativ e nonlinear Sc hr¨ o ding er equation, i.e,. the D NLSI I [31 ] iq t + q xx + iq q ∗ q x = 0 , (2) and the DNLSI I I [32 ] iq t + q xx − iq 2 q ∗ x + 1 2 q 3 q ∗ 2 = 0 , (3) and a c hain of gauge transformations b etw een them: DNLSI I a ) = ⇒ DNLSI b ) = ⇒ DNLSI I I. Here a) denotes eq.(2.12) in ref. [30], and b) denotes : eq.(4) → eq.(3) → eq.(6) with γ = 0 in ref. [23]. But these transformations can not preserv e the reduction conditions in sp ectral problem of 2 the KN system and in v o lve complicated integrations. So each of them deserv es in v estigating separately . There are t w o aims of this pap er. First aim is to presen t a detailed deriv atio n of the DT for the DNLS and its determinan t represen tation. Using this represen tatio n, t he solutions of DNLS can b e expressed b y the solutions(eigenfunctions) of the linear partial differen tial equations of the sp ectral problem of the KN system instead of the solutions of the no nlinear Riccati equations, whic h sho ws that the nonlinear Riccati equation and Seahorse f unctions are indeed av oidable f o r the DT from nonzero seeds. A second aim is to presen t a complete classification of the solutions generated by o ne-f old DT from zero seed, non-zero seeds: constant solution and p erio dic solution with a constan t amplitude. The organization of this pap er is as follo ws. In section 2, it pro vides a relative ly simple approac h to DT for the KN system, and then the determinan t represen tation of the n-fold DT and form ulae of q [ n ] and r [ n ] expresse d b y eigenfunctions of sp ectral problem ar e give n. The reduction o f DT of the KN system to the D NLS equation is also discussed b y choosing paired eigen v alues and eigenfunctions. In section 3 , under sp ecific reduction conditions, sev eral types of particular solutions are given from zero seed, non-zero se eds: constant solution and p erio dic solution with a constan t amplitude. The complete classification of dark soliton, brig h t soliton, p erio dic solution ar e giv en in a table for one-fold DT of the DNLS eq uation. In particular, t w o kinds of new solutions: rat io nal tra v eling solution and rogue wa v e are giv en. The conclusion will b e giv en in section 4. 2. D arboux transforma tion Let us start from the first non-trivial flo w of the KN system [1 0], r t − ir xx − ( r 2 q ) x = 0 , (4) q t + iq xx − ( r q 2 ) x = 0 , (5) whic h are exactly reduced t o the DNLS eq.(1) for r = − q ∗ while the c hoice r = q ∗ w ould lead to eq .(1) with the sign of the nonline ar term c hanged. The Lax pairs corresp onding to coupled DNLS equations(4) and (5) can b e g iv en by the KaupCNew ell sp ectral problem [10] ∂ x ψ = ( J λ 2 + Qλ ) ψ = U ψ, (6) ∂ t ψ = (2 J λ 4 + V 3 λ 3 + V 2 λ 2 + V 1 λ ) ψ = V ψ , (7) with ψ = φ ϕ , J = i 0 0 − i , Q = 0 q r 0 , V 3 = 2 Q, V 2 = J qr, V 1 = 0 − iq x + q 2 r ir x + r 2 q 0 . Here λ , a n arbitrary complex n um b er, is called the eigen v a lue(or sp ectral parameter), and ψ is called the eigenfunction asso ciated with λ of the KN system. E quations(4) and (5) ar e equiv alen t t o the integrabilit y condition U t − V x + [ U, V ] = 0 of (6) and (7) . The main task of this section is t o presen t a de tailed deriv a tion of the Darb oux transforation of the D NLS and the determinan t represen tatio n of the n-fold tra nsfor ma t io n. Based on the DT for the NLS [26 – 28] and the D NLS [24, 25], the m ain steps are : 1) to find a 2 × 2 matrix T so that the KN sp ectral problem eq.(6) and eq.(7) is co v arian t, then get new solution ( q [1] , r [1] ) expresse d b y elemen ts of T and seed solution ( q , r ); 2) to find expressions of elemen ts of T in terms of eigenfunctions of KN sp ectral problem correspo nding to the seed solution ( q , r ) ; 3) 3 to get t he determinan t represen tation of n- f old DT T n and new solutions ( q [ n ] , r [ n ] ) by n -times iteration of the DT; 4) to consider the reduction condition: q [ n ] = − ( r [ n ] ) ∗ b y choosing sp ecial eigen v alue λ k and its eige nfunction ψ k , and then get q [ n ] of the D NLS equation ex pressed b y its seed solution q and its asso ciated eigenfunctions { ψ k , k = 1 , 2 , · · · , n } . Ho we v er, w e shall use the k ernel o f n-fold D T( T n ) to fix it in the third step instead of iteration. It is easy to see that the sp ectral problem ( 6 ) and (7) are transformed to ψ [1] x = U [1] ψ [1] , U [1] = ( T x + T U ) T − 1 . (8) ψ [1] t = V [1] ψ [1] , V [1] = ( T t + T V ) T − 1 . (9) under a gauge transformation ψ [1] = T ψ . (10) By cross differen t ia ting (8) and (9), w e obtain U [1] t − V [1] x + [ U [1] , V [1] ] = T ( U t − V x + [ U, V ]) T − 1 . (11) This implies that, in order to mak e eqs.(4) and eq.(5) inv a r ian t under the transformation (10), it is crucial to search a matrix T so that U [1] , V [1] ha v e the same forms as U , V . A t the same time the old p o t en tial(or seed solution)( q , r ) in sp ectral matrixes U , V are mapp ed into new p oten tials (o r new solution)( q [1] , r [1] ) in transfor med sp ectral matrixes U [1] , V [1] . 2.1 One-fold D arb oux transformat io n of t he KN system Considering the univ ersalit y of DT, suppose that the trial D arb oux matrix T in eq.(10 ) is of form T = T ( λ ) = a 1 b 1 c 1 d 1 λ + a 0 b 0 c 0 d 0 , (12) where a 0 , b 0 , c 0 , d 0 , a 1 , b 1 , c 1 , d 1 are functions of x , t to need b e determined. F rom T x + T U = U [1] T , (13) comparing the co efficien ts of λ j , j = 3 , 2 , 1 , 0, it yields λ 3 : b 1 = 0 , c 1 = 0 , λ 2 : q a 1 − 2 i b 0 − q [1] d 1 = 0 , − r [1] a 1 + r d 1 + 2 i c 0 = 0 , λ 1 : a 1 x + r b 0 − q [1] c 0 = 0 , d 1 x + q c 0 − r [1] b 0 = 0 , q a 0 − q [1] d 0 = 0 , − r [1] a 0 + r d 0 = 0 , λ 0 : a 0 x = b 0 x = c 0 x = d 0 x = 0 . (14) The last equation show s a 0 , b 0 , c 0 , d 0 are functions of t only . Similarly , f rom T t + T V = V [1] T , (15) comparing the co efficien ts of λ j , j = 4 , 3 , 2 , 1 , 0,it implies λ 4 : − 2 ib 0 − q [1] d 1 + q a 1 = 0 , 2 ic 0 − 2 r [1] a 1 + r d 1 = 0 , λ 3 : − r [1] q [1] a 1 i − 2 q [1] c 0 + a 1 r q i + 2 r b 0 = 0 , q a 0 − q [1] d 0 = 0 , r d 0 − r [1] a 0 = 0 , − d 1 r q i + r [1] q [1] d 1 i + 2 q c 0 − 2 r [1] b 0 = 0 , λ 2 : a 0 r q − a 0 r [1] q [1] = 0 , a 1 r q 2 − r [1] q [1] 2 d 1 − b 0 r q i + q [1] x d 1 i − a 1 q x i − r [1] q [1] b 0 i = 0 , c 0 r q i − r [1] 2 q [1] a 1 + d 1 r 2 q + r [1] q [1] c 0 i + d 1 r x i − r [1] x a 1 i = 0 , r [1] q [1] d 0 − r q d 0 = 0 , λ 1 : a 1 t + q [1] x c 0 i + b 0 r 2 q − r [1] q [1] 2 c 0 + b 0 r x i = 0 , − r [1] q [1] 2 d 0 + a 0 r q 2 + q [1] x d 0 i − a 0 q x i = 0 , 4 d 0 r x i + d 0 r 2 q − r [1] 2 q [1] a 0 − r [1] x a 0 i = 0 , d 1 t − c 0 q x i + c 0 r q 2 − r [1] 2 q [1] b 0 − r [1] x b 0 i = 0 , λ 0 : a 0 t = b 0 t = c 0 t = d 0 t = 0 . (16) The last equation show s a 0 , b 0 , c 0 , d 0 are functions of x only . So a 0 , b 0 , c 0 , d 0 are constan ts. In order to get the non-trivial s olutions, w e presen t a D arb oux transformation under the condition a 0 = 0 , d 0 = 0. Based on eq.(14) and eq.(16) and without losing an y generalit y , let Darb oux matr ix T b e the form of T 1 = T 1 ( λ ; λ 1 ) = a 1 0 0 d 1 λ + 0 b 0 c 0 0 . (17) Here a 1 , d 1 are undetermined function of ( x , t ), whic h will b e expressed b y the eigenfunction asso ciated with λ 1 in the KN sp ectral problem. First of all, w e in tro duce n eigenfunctions ψ j as ψ j = φ j ϕ j , j = 1 , 2 , ....n, φ j = φ j ( x, t, λ j ) , ϕ j = ϕ j ( x, t, λ j ) . (18) Theorem 1. The elemen ts of one-fold DT are parameterized by the eigenfunction ψ 1 asso ciated with λ 1 as d 1 = 1 a 1 , a 1 = − ϕ 1 φ 1 , b 0 = c 0 = λ 1 , (19) ⇔ T 1 ( λ ; λ 1 ) = − λ ϕ 1 φ 1 λ 1 λ 1 − λ φ 1 ϕ 1 , (20) and then the new solutions q [1] and r [1] are give n b y q [1] = ( ϕ 1 φ 1 ) 2 q + 2 i ϕ 1 φ 1 λ 1 , r [1] = ( φ 1 ϕ 1 ) 2 r − 2 i φ 1 ϕ 1 λ 1 , (21) and the new eigenfunction ψ [1] j corresp onding to λ j is ψ [1] j = 1 φ 1 − λ j φ j ϕ j − λ 1 φ 1 ϕ 1 1 ϕ 1 − λ j ϕ j φ j − λ 1 ϕ 1 φ 1 . (22) Pro of. Note that ( a 1 d 1 ) x = 0 is deriv ed from the eq.(14), and then tak e a 1 = 1 d 1 in the follo wings. By transformat ion eq.(17) and eq.(14), new solutions a re give n b y q [1] = a 1 d 1 q − 2 i b 0 d 1 , r [1] = d 1 a 1 q + 2 i c 0 a 1 . (23) By using a general fact of the DT, i.e., T 1 ( λ ; λ 1 ) | λ = λ 1 ψ 1 = 0, then eq.(19) is obtained. Next, substituting ( a 1 , d 1 , b 0 , c 0 ) given in eq.(19) bac k into eq.(23), then new solutions a r e give n as eq. (21). F urther, b y using the explicit matrix represen tat io n eq.(20) of T 1 , then ψ [1] j is giv en 5 b y ψ [1] j = T 1 ( λ ; λ 1 ) | λ = λ j ψ j = − λ ϕ 1 φ 1 λ 1 λ 1 − λ φ 1 ϕ 1 λ = λ j φ j ϕ j = 1 φ 1 − λ j φ j ϕ j − λ 1 φ 1 ϕ 1 1 ϕ 1 − λ j ϕ j φ j − λ 1 ϕ 1 φ 1 . (24) Last, a tedious calculation sho ws that T 1 in eq.(20) and new solutions indeed s atisfy eq.(15) or (equiv alen tly eq.(16)). So KN sp ectral problem is cov ariant under transformation T 1 in e q.(20) and eq.(21), and th us it is the D T of eq.(4 ) and eq.(5). It is easy to find that T 1 is equiv alen t to the Imai’s result(see eq.(7) o f ref. [24]) and to the Steudel’s result(see eq.(21) of ref. [2 5]). Our deriv ation is more transparen t, and new solutions q [1] and r [1] can b e constructed by the eigenfunction ψ 1 , whic h is a solution o f linear partial differen t equations eq.(4) and eq.(5). This is simpler than Steudel’s metho d to solv e nonlinear Riccati equations. The remaining pro blem is ho w to guaran tee the v alidit y of the r eduction condition, i.e., q [1] = − ( r [1] ) ∗ . W e shall solv e it at the end of this section b y choosing sp ecial eigenfunctions and eigen v alues. 2.2 N-fold D arb oux transformat ion for KN system The k ey task is to establish the determinan t represen ta t io n of the n-f old DT for KN system in this subsection. T o this purp ose, set D = a 0 0 d a, d are complex f unctions of x and t , A = 0 b c 0 b, c are complex functions o f x and t , as ref. [24]. According to the form of T 1 in eq.(17), the n-fold DT should b e the form of [24] T n = T n ( λ ; λ 1 , λ 2 , · · · , λ n ) = n X l =0 P l λ l , (25) with P n = a n 0 0 d n ∈ D , P n − 1 = 0 b n − 1 c n − 1 0 ∈ A , P l ∈ D (if l − n is e v en) , P l ∈ A (if l − n is odd ) . (26) Here P 0 is a constan t matr ix, P i (1 ≤ i ≤ n ) is the function of x and t . In par t icular, P 0 ∈ D if n is ev en and P 0 ∈ A if n is o dd, whic h leads to the separate discussion on the determi- nan t represen ta tion of T n in the follo wing b y means of its kernel. Specifically , fro m a lg ebraic equations, ψ [ n ] k = T n ( λ ; λ 1 , · · · , λ n ) | λ = λ k ψ k = n X l =0 P l λ l k ψ k = 0 , k = 1 , 2 , · · · , n, (27) co efficien ts P i is solv ed by Cramer’s r ule. Th us w e g et determinan t represen tation o f the T n . 6 Theorem2. (1)F or n = 2 k ( k = 1 , 2 , 3 , · · · ), the n-fold D T of the KN system can b e expressed b y T n = T n ( λ ; λ 1 , λ 2 , · · · , λ n ) = ^ ( T n ) 11 W n ^ ( T n ) 12 W n ^ ( T n ) 21 f W n ^ ( T n ) 22 f W n , (28) with W n = λ n 1 φ 1 λ n − 1 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 2 1 φ 1 λ 1 ϕ 1 λ n 2 φ 2 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 2 2 φ 2 λ 2 ϕ 2 . . . . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ 2 n φ n λ n ϕ n , ^ ( T n ) 11 = λ n 0 λ n − 2 0 . . . λ 2 0 λ 1 λ 2 . . . λ n λ n 1 φ 1 λ n − 2 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 2 1 φ 1 λ 1 ϕ 1 λ 1 λ 2 . . . λ n φ 1 λ n 2 φ 2 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 2 2 φ 2 λ 2 ϕ 2 λ 1 λ 2 . . . λ n φ 2 . . . . . . . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ 2 n φ n λ n ϕ n λ 1 λ 2 . . . λ n φ 1 , ^ ( T n ) 12 = 0 λ n − 1 0 λ n − 3 . . . 0 λ 0 λ n 1 φ 1 λ n − 1 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 2 1 φ 1 λ 1 ϕ 1 λ 1 λ 2 . . . λ n φ 1 λ n 2 φ 2 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 2 2 φ 2 λ 2 ϕ 2 λ 1 λ 2 . . . λ n φ 2 . . . . . . . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ 2 n φ n λ n ϕ n λ 1 λ 2 . . . λ n φ 1 , f W n = λ n 1 ϕ 1 λ n − 1 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 2 1 ϕ 1 λ 1 φ 1 λ n 2 ϕ 2 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 2 2 ϕ 2 λ 2 φ 2 . . . . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ 2 n ϕ n λ n φ n , ^ ( T n ) 21 = 0 λ n − 1 0 λ n − 3 . . . 0 λ 0 λ n 1 ϕ 1 λ n − 1 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 2 1 ϕ 1 λ 1 φ 1 λ 1 λ 2 . . . λ n ϕ 1 λ n 2 ϕ 2 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 2 2 ϕ 2 λ 2 φ 2 λ 1 λ 2 . . . λ n ϕ 2 . . . . . . . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ 2 n ϕ n λ n φ n λ 1 λ 2 . . . λ n ϕ 1 , ^ ( T n ) 22 = λ n 0 λ n − 2 0 . . . λ 2 0 λ 1 λ 2 . . . λ n λ n 1 ϕ 1 λ n − 2 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 2 1 ϕ 1 λ 1 φ 1 λ 1 λ 2 . . . λ n ϕ 1 λ n 2 ϕ 2 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 2 2 ϕ 2 λ 2 φ 2 λ 1 λ 2 . . . λ n ϕ 2 . . . . . . . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ 2 n ϕ n λ n φ n λ 1 λ 2 . . . λ n ϕ 1 . 7 (2)F or n = 2 k + 1( k = 1 , 2 , 3 , · · · ), then T n = T n ( λ ; λ 1 , λ 2 , · · · , λ n ) = \ ( T n ) 11 Q n \ ( T n ) 12 Q n \ ( T n ) 21 c Q n \ ( T n ) 22 c Q n , (29) with Q n = λ n 1 φ 1 λ n − 1 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 3 1 φ 1 λ 2 1 ϕ 1 λ 1 φ 1 λ n 2 φ 2 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 3 2 φ 2 λ 2 2 ϕ 2 λ 2 φ 2 . . . . . . . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ 3 n φ n λ 2 n ϕ n λ n φ n , \ ( T n ) 11 = λ n 0 λ n − 2 0 . . . λ 3 0 λ 0 λ n 1 φ 1 λ n − 1 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 3 1 φ 1 λ 2 1 ϕ 1 λ 1 φ 1 − λ 1 λ 2 . . . λ n ϕ 1 λ n 2 φ 2 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 3 2 φ 2 λ 2 2 ϕ 2 λ 2 φ 2 − λ 1 λ 2 . . . λ n ϕ 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ 3 n φ n λ 2 n ϕ n λ n φ n − λ 1 λ 2 . . . λ n ϕ n , \ ( T n ) 12 = 0 λ n − 1 0 λ n − 3 ... 0 λ 2 0 − λ 1 λ 2 . . . λ n λ n 1 φ 1 λ n − 1 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 3 1 φ 1 λ 2 1 ϕ 1 λ 1 φ 1 − λ 1 λ 2 . . . λ n ϕ 1 λ n 2 φ 2 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 3 2 φ 2 λ 2 2 ϕ 2 λ 2 φ 2 − λ 1 λ 2 . . . λ n ϕ 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ 3 n φ n λ 2 n ϕ n λ n φ n − λ 1 λ 2 . . . λ n ϕ n , c Q n = λ n 1 ϕ 1 λ n − 1 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 3 1 ϕ 1 λ 2 1 φ 1 λ 1 ϕ 1 λ n 2 ϕ 2 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 3 2 ϕ 2 λ 2 2 φ 2 λ 2 ϕ 2 . . . . . . . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ 3 n ϕ n λ 2 n φ n λ n ϕ n , \ ( T n ) 21 = 0 λ n − 1 0 λ n − 3 ... 0 λ 2 0 − λ 1 λ 2 . . . λ n λ n 1 ϕ 1 λ n − 1 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 3 1 ϕ 1 λ 2 1 φ 1 λ 1 ϕ 1 − λ 1 λ 2 . . . λ n φ 1 λ n 2 ϕ 2 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 3 2 ϕ 2 λ 2 2 φ 2 λ 2 ϕ 2 − λ 1 λ 2 . . . λ n φ 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ 3 n ϕ n λ 2 n φ n λ n ϕ n − λ 1 λ 2 . . . λ n φ n , \ ( T n ) 22 = λ n 0 λ n − 2 0 . . . λ 3 0 λ 0 λ n 1 ϕ 1 λ n − 1 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 3 1 ϕ 1 λ 2 1 φ 1 λ 1 ϕ 1 − λ 1 λ 2 . . . λ n φ 1 λ n 2 ϕ 2 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 3 2 ϕ 2 λ 2 2 φ 2 λ 2 ϕ 2 − λ 1 λ 2 . . . λ n φ 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ 3 n ϕ n λ 2 n φ n λ n ϕ n − λ 1 λ 2 . . . λ n φ n . (30) Next, we consider the tra nsformed new solutions ( q [ n ] , r [ n ] )of KN system corresp o nding to the n-fold DT. Under co v ariant requiremen t of sp ectral problem of the KN system, the transformed form should b e ∂ x ψ [ n ] = ( J λ 2 + Q [ n ] λ ) ψ = U [ n ] ψ , (31) 8 with ψ = φ ϕ , J = i 0 0 − i , Q [ n ] = 0 q [ n ] r [ n ] 0 , (32) and then T n x + T n U = U [ n ] T n . (33) Substituting T n giv en b y eq.(25 ) in to eq.(33 ),and then comparing the co efficien t s of λ n +1 , it yields q [ n ] = a n d n q − 2 i b n − 1 d n , r [ n ] = d n a n r + 2 i c n − 1 a n . (34) F urthermore, taking a n , d n , b n − 1 , c n − 1 whic h are o bta ined from eq.(28) fo r n = 2 k and from eq.(29) for n = 2 k + 1, in to (34 ) , then new solutions ( q [ n ] , r [ n ] ) are given b y q [ n ] = Ω 2 11 Ω 2 21 q + 2 i Ω 11 Ω 12 Ω 2 21 , r [ n ] = Ω 2 21 Ω 2 11 r − 2 i Ω 21 Ω 22 Ω 2 11 . (35) Here, (1)for n = 2 k , Ω 11 = λ n − 1 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 1 ϕ 1 φ 1 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 2 ϕ 2 φ 2 . . . . . . . . . . . . . . . . . . λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ n ϕ n φ n , (36) Ω 12 = λ n 1 φ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 1 ϕ 1 φ 1 λ n 2 φ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 2 ϕ 2 φ 2 . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ n ϕ n φ n , Ω 21 = λ n − 1 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 1 φ 1 ϕ 1 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 2 φ 2 ϕ 2 . . . . . . . . . . . . . . . . . . λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ n φ n ϕ n , Ω 22 = λ n 1 ϕ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 1 φ 1 ϕ 1 λ n 1 ϕ 1 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 2 φ 2 ϕ 2 . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ n φ n ϕ n ; (2) for n = 2 k + 1, Ω 11 = λ n − 1 1 ϕ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 1 φ 1 ϕ 1 λ n − 1 2 ϕ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 2 φ 2 ϕ 2 . . . . . . . . . . . . . . . . . . λ n − 1 n ϕ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ n φ n ϕ n , (37) Ω 12 = λ n 1 φ 1 λ n − 2 1 φ 1 λ n − 3 1 ϕ 1 . . . λ 1 φ 1 ϕ 1 λ n 2 φ 2 λ n − 2 2 φ 2 λ n − 3 2 ϕ 2 . . . λ 2 φ 2 ϕ 2 . . . . . . . . . . . . . . . . . . λ n n φ n λ n − 2 n φ n λ n − 3 n ϕ n . . . λ n φ n ϕ n , 9 Ω 21 = λ n − 1 1 φ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 1 ϕ 1 φ 1 λ n − 1 2 φ 2 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 2 ϕ 2 φ 2 . . . . . . . . . . . . . . . . . . λ n − 1 n φ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ n ϕ n φ n , Ω 22 = λ n 1 ϕ 1 λ n − 2 1 ϕ 1 λ n − 3 1 φ 1 . . . λ 1 ϕ 1 φ 1 λ n 1 ϕ 1 λ n − 2 2 ϕ 2 λ n − 3 2 φ 2 . . . λ 2 ϕ 2 φ 2 . . . . . . . . . . . . . . . . . . λ n n ϕ n λ n − 2 n ϕ n λ n − 3 n φ n . . . λ n ϕ n φ n . W e are now in a p osition to consider the reduction of the DT of the KN system so that q [ n ] = − ( r [ n ] ) ∗ , then the DT of the DNLS is given. Under the reduction condition q = − r ∗ , the eigenfunction ψ k = φ k ϕ k asso ciated with eigen v alue λ k has following properties [24], (i): φ ∗ k = ϕ k , λ k = − λ k ∗ ; (ii): φ k ∗ = ϕ l , ϕ k ∗ = φ l , λ k ∗ = − λ l , where k 6 = l . Notice that the denominator W n of q [ n ] is a mo dulus of a non-zero complex f unction under reduction condition, so the new solution q [ n ] is non-singular. F o r the one-fo ld DT T 1 , set λ 1 = iβ 1 (a pure imaginar y constan t), and its eigenfunction ψ 1 = φ 1 φ ∗ 1 , (38) then T 1 in theorem 1 is the D T of the DNLS. W e note that q [1] = − ( r [1] ) ∗ holds with the help of eq.(21), q = − r ∗ and this sp ecial choice of ψ 1 . This is an essen tial distinctness of DT b et w een DNLS a nd NLS, b ecause one-fold transformatio n o f AKNS can not preserv e the reduction condition to the NLS. F urthermore, for the t w o-fold DT, according to ab o v e pro p ert y (ii), set λ 2 = − λ ∗ 1 and its eigenfunction ψ 2 = ϕ ∗ 1 φ ∗ 1 , ψ 1 = φ 1 ϕ 1 asso ciated with eigen v alue λ 1 , (39) then q [2] = − ( r [2] ) ∗ can be v erified from eq. (35) and T 2 giv en b y eq.(28) is the DT of the DNLS. Of course, in order to get q [2] = − ( r [2] ) ∗ so t hat T 2 b ecomes also the DT of the DNLS, w e can also set λ l = iβ l (pure imaginary) and its eigenfunction ψ l = ϕ ∗ l φ ∗ l , l = 1 , 2 . (40) There are man y c hoices to guarante e q [ n ] = − ( r [ n ] ) ∗ for the n-fold DTs when n > 2. F or example, setting n = 2 k and l = 1 , 3 , . . . , 2 k − 1 ,then c ho osing following k distinct eigen v alues and eigenfunctions in n-fo ld DTs: λ l ↔ ψ l = φ l ϕ l , and λ 2 l = − λ ∗ 2 l − 1 , ↔ ψ 2 l = ϕ ∗ 2 l − 1 φ ∗ 2 l − 1 (41) so that q [2 k ] = − ( r [2 k ] ) ∗ in eq.(35). Th en T 2 k with these paired-eigen v alue λ i and paired- eigenfunctions ψ i ( i = 1 , 3 , . . . , 2 k − 1) is reduced to the (2 k)- fold DT of the DNLS. Similarly , T 2 k + 1 in eq.(29) can also b e reduced to the (2k+1)-fold DT of the DNLS b y c ho osing one pure imaginary λ 2 k + 1 = iβ 2 k + 1 (pure imaginary) and k paired-eigenv alues λ 2 l = − λ ∗ 2 l − 1 ( l = 1 , 2 , · · · , k ) with corresp onding eigenfunctions according to prop erties ( i) and (ii). 10 3. P ar ticular solutions 3.1. Darb o ux tra nsformations applied to zero seed F or q = r = 0 the equations (6 ) and (7 ) are solv ed b y ψ k = φ k ϕ k , φ k = exp( i ( λ k 2 x + 2 λ k 4 t )) , ϕ k = exp( − i ( λ k 2 x + 2 λ k 4 t )) . (42) Case 1( N = 1). Unde r the c ho ice eq.(38 ), taking ψ 1 in eq.(42) bac k into eq.(21) with λ 1 = iβ 1 , then one solution of the DNLS is q [1] = − 2 β 1 exp( − 2 i ( − β 1 2 x + 2 β 1 4 t )) , (43) whic h is not a soliton but a p erio dic solution with a constan t amplitude. Case 2(N= 2 ). Considering the c hoice in e q.(40) with λ 1 = i ( l + m ), λ 2 = i ( l − m ), and ta king eigenfunctions in eq. (42) bac k in to T 2 ,the result of the D T of the DNLS is then simply found from (35), q [2] = − 4 l m ( m cos(2 G ) − il sin (2 G )) 3 (( m 2 − l 2 ) cos(2 G ) 2 + l 2 ) 2 exp(2 iF ) , (44) whic h is a quasi-p erio dic solution,and here F = − l 2 x + 2 l 4 t + 12 l 2 m 2 t − m 2 x + 2 m 4 t , G = 8 l 3 mt − 2 lmx + 8 l m 3 t . F urthermore, considering the c hoice in eq.(39) with λ 1 = α 1 + iβ 1 , λ 2 = − α 1 + iβ 1 , and using eigenfunctions in eq. (42), then the solution of the D NLS gene rated b y t w o-fold DT is simply found fro m (35), q [2] = 4 iα β ( − iα 1 cosh(2Γ) + β 1 sinh(2Γ)) 3 (( − α 1 2 − β 1 2 ) cosh(2Γ) 2 + β 1 2 ) 2 exp(2 ih ) , (45) with h = − β 1 2 x + 2 β 1 4 t − 12 α 1 2 β 1 2 t + α 1 2 x + 2 α 1 4 t , Γ = − 8 α 1 β 1 3 t + 2 α 1 β 1 x + 8 α 1 3 β 1 t . By letting α 1 → 0 in(45), it b ecomes a rational solution q [2] = 4 β 1 exp (2 iβ 1 2 ( − x + 2 β 1 2 t )) (4 iβ 1 2 (4 β 1 2 t − x ) − 1) 3 (16 β 1 4 (4 β 1 2 t − x ) 2 + 1) 2 , (46) with an arbitrary real constant β 1 . Obv iously , the rationa l solution is a linar soliton, and its tra jectory is defined explicitly b y x = 4 β 1 2 t, (47) on ( x − t ) plane. The solutions q [1] and q [2] of the DNLS equation are consisten t with the results of ref. [24, 25] except the rationa l solution. So the ratio na l solution q [2] in eq.(46) of the DNLS equation is first found in this pap er, whic h is plotted in Figure 1. Figure 1. Rational solution | q [2] | 2 of the D NLS with β 1 = 0 . 5. 11 3.2. Darb o ux transformatio ns applied to non-zero seeds : constant solutio n and p erio dic solution. Set a and c b e tw o complex constan ts, and take c > 0 without loss of generalit y , then q = c exp ( i ( ax + ( − c 2 + a ) at )) is a perio dic solution of the DNLS equation, whic h will b e used as a seed solution of the DT. Substituting q = c exp ( i ( ax + ( − c 2 + a ) at )) in to the sp ectral problem eq.(6) and eq.(7), and using the method of separation of v a r ia bles and the sup erp osition principle, the eigenfunction ψ k asso ciated with λ k is giv en b y φ k ( x, t, λ k ) ϕ k ( x, t, λ k ) = 1( x, t, λ k )[1 , k ] + 2( x, t, λ k )[1 , k ] + 1 ∗ ( x, t, − λ ∗ k )[2 , k ] + 2 ∗ ( x, t, − λ ∗ k )[2 , k ] 1( x, t, λ k )[2 , k ] + 2( x, t, λ k )[2 , k ] + 1 ∗ ( x, t, − λ ∗ k )[1 , k ] + 2 ∗ ( x, t, − λ ∗ k )[1 , k ] . (48 ) Here 1( x, t, λ k )[1 , k ] 1( x, t, λ k )[2 , k ] = exp( √ s ( x + 2 λ k 2 t + ( − c 2 + a ) t ) 2 + 1 2 ( i ( ax + ( − c 2 + a ) at ))) ia − 2 iλ k 2 + √ s 2 λ k c exp( √ s ( x + 2 λ k 2 t + ( − c 2 + a ) t ) 2 − 1 2 ( i ( ax + ( − c 2 + a ) at ))) , 2( x, t, λ k )[1 , k ] 2( x, t, λ k )[2 , k ] = exp( − √ s ( x + 2 λ k 2 t + ( − c 2 + a ) t ) 2 + 1 2 ( i ( ax + ( − c 2 + a ) at ))) ia − 2 iλ k 2 − √ s 2 λ k c exp( − √ s ( x + 2 λ k 2 t + ( − c 2 + a ) t ) 2 − 1 2 ( i ( ax + ( − c 2 + a ) at ))) , 1( x, t, λ k ) = 1( x, t, λ k )[1 , k ] 1( x, t, λ k )[2 , k ] , 2( x, t, λ k ) = 2( x, t, λ k )[1 , k ] 2( x, t, λ k )[2 , k ] , s = − a 2 − 4 λ k 4 − 4 λ k 2 ( c 2 − a ) . Note that 1( x, t, λ k ) and 2( x, t, λ k ) ar e tw o differen t solutions of the sp ectral pro blem eq.(6 ) and eq.(7), but w e can only get the trivial solutions through D T of the DNLS by setting eigenfunction ψ k b e one of them. What is more ,w e can get ric her solutio ns b y using (48). Case 3( N = 1). Under c ho ice in eq. (38) with ψ 1 giv en by eq.(48) and λ 1 = iβ 1 , the one-fold DT of the D NLS generates | q [1] | 2 = c 2 − 2 a + 2(2 β 1 2 + a ) 2 − 8 c 2 β 1 2 a + 2 β 1 2 + 2 cβ 1 cosh( K ( x − 2 β 1 2 t + at − c 2 t )) , (49) with K = q 4 c 2 β 1 2 − (2 β 1 2 + a ) 2 , according to eq.(21). By letting x → ∞ , t → ∞ , so | q [1] | 2 → c 2 − 2 a . The tra j ectory is defined implicitly b y x − 2 β 1 2 t + at − c 2 t = 0 . (50) The q [1] in eq.(49) giv es a soliton solutions if 4 c 2 β 1 2 − (2 β 1 2 + a ) 2 > 0, and g iv es a p erio dic solution if 4 c 2 β 1 2 − (2 β 1 2 + a ) 2 < 0. Th is classification is consisten t with Steudel( see F ig ure 1 of ref. [25]). F urther, w e find that q [1] in eq.(49 ) can generate a dark soliton if c 2 − 2 a > ( c − 2 β 1 ) 2 and a brig ht solitons if c 2 − 2 a < ( c − 2 β 1 ) 2 . Here | q [1] | 2 extr eme = ( c 2 − 2 a ) + 2((2 β 2 1 + a ) 2 − 4 c 2 β 2 1 ) a + 2 β 1 c + β 2 1 = (2 β 1 − c ) 2 . 12 Note, δ = K 2 has four ro ots o f β 1 and δ 0 = (2 β 1 − c ) 2 − ( c 2 − 2 a ) has t w o ro ots of β 1 in general. Com bining the conditions of the brigh t/dark soliton a nd p erio dic solutions, a complete classification of the differen t solutions generated by one -fold DT is obtained in T able 1. The depth of the dark soliton is 2 ( − a + 2 β 1 c − 2 β 1 2 ) and the height of the brigh t soliton is 2( a − 2 β 1 c + 2 β 1 2 ). Particularly , for a = 0, the seed solution q = c is a p ositiv e constan t, and then the one fo ld DT o f the D NLS generates a dar k soliton under the condition 0 < β 1 < c , the brigh t soliton under − c < β 1 < 0, a p erio dic solution under β 1 < − c and β 1 > c . T o illustrate the table, Figure 2 is plotted for t he case of c > 0 and a < 0. Set y 1 = ( c − 2 β 1 ) 2 , y 2 = 4 c 2 β 1 2 − (2 β 1 2 + a ) 2 = δ , y 3 = c 2 − 2 a with sp ecific parameters a = − 1 . 5 c = 0 . 8. There are four ro ots of y 2 , whic h a r e ( β 1 ) 1 > ( β 1 ) 2 > ( β 1 ) 3 > ( β 1 ) 4 . Note the ( β 1 ) 2 and ( β 1 ) 3 are also the ro ots of y 1 − y 3 = δ 0 . W e can see from Figure 2 that, q [1] in eq.(49) giv es the bright s oliton when β 1 ∈ (( β 1 ) 4 , ( β 1 ) 3 ) because y 2 > 0 and y 1 > y 3 , dark soliton when β 1 ∈ (( β 1 ) 2 , ( β 1 ) 1 ) b ecause y 2 > 0 and y 1 < y 3 ,p erio dic solutions f o r others three cases of β 1 b ecause y 2 < 0. T able 1. Classification of the solutions q [1] generated b y one-fold DT in case 3 ac- cording to the in terv als of the eigen v alue λ 1 = iβ 1 . Classification of the solutions generated b y one-fold DT zero seed c = 0 ∀ β 1 ∈ R p erio dic solution constan t seed a = 0 , c > 0 0 < β 1 < c dark solitons − c < β 1 < 0 brigh t solitons β 1 b elongs to other tw o in terv als p erio dic solutions c 2 2 >a p erio dic seed a > 0 , c > 0 1 2 c − 1 2 √ c 2 − 2 a < β 1 < 1 2 c + 1 2 √ c 2 − 2 a dark solitons − 1 2 c − 1 2 √ c 2 − 2 a < β 1 < − 1 2 c + 1 2 √ c 2 − 2 a brigh t solitons β 1 b elongs to other three in terv als p erio dic solutions a < 0 , c > 0 − 1 2 c + 1 2 √ c 2 − 2 a < β 1 < 1 2 c + 1 2 √ c 2 − 2 a dark solitons − 1 2 c − 1 2 √ c 2 − 2 a < β 1 < 1 2 c − 1 2 √ c 2 − 2 a brigh t solitons β 1 b elongs to other three in terv als p erio dic solutions c 2 2 ≤ a p erio dic seed a > 0 , c > 0 ∀ β 1 ∈ R p erio dic solutions 13 Figure 2. Interv als of β 1 in one- fold DT g enerate differ ent solutions q [1] (dark so liton, br ight soliton and p erio dic solution) under specific para meter s a = − 1 . 5 , c = 0 . 8. Here y 1 = ( c − 2 β 1 ) 2 , y 2 = 4 c 2 β 1 2 − (2 β 1 2 + a ) 2 , y 3 = c 2 − 2 a . There ar e five in terv a ls of β 1 divided by the four ro o ts of y 2 . F rom the left to the r ight, the second interv al and the fourth interv al cor resp ond to the bright soliton, dark soliton resp ectively . The other three in terv als co r resp ond to th e p erio dic solutions. Case 4.( N = 2). Under the c hoice in eq.(40) with λ 1 = iβ 1 , λ 2 = iβ 2 , β 1 6 = β 2 , the s olution of the DNLS equation is generated b y tw o-fold DT from(35) as q [2] = ( β 1 φ ∗ 1 φ 2 − β 2 φ 1 φ ∗ 2 ) 2 ( β 1 φ 1 φ ∗ 2 − β 2 φ ∗ 1 φ 2 ) 2 q − 2 ( β 1 2 − β 2 2 ) φ 1 φ 2 ( β 1 φ ∗ 1 φ 2 − β 2 φ 1 φ ∗ 2 ) ( β 1 φ 1 φ ∗ 2 − β 2 φ ∗ 1 φ 2 ) 2 , (51) where φ 1 and φ 2 are giv en b y eq.(48). Similarly , under the c hoice in eq.(39 ) with o ne paired eigen v alue λ 1 = α 1 + iβ 1 and λ 2 = − α 1 + iβ 1 , the t w o-fold D T eq.(35) of the D NLS equation implies a solution q [2] = ( λ 1 ϕ 1 ϕ 1 ∗ − λ 2 φ 1 φ 1 ∗ ) 2 ( − λ 2 ϕ 1 ϕ 1 ∗ + λ 1 φ 1 φ 1 ∗ ) 2 q + 2 i ( λ 1 2 − λ 2 2 ) φ 1 ϕ 1 ∗ ( λ 1 ϕ 1 ϕ 1 ∗ − λ 2 φ 1 φ 1 ∗ ) ( − λ 2 ϕ 1 ϕ 1 ∗ + λ 1 φ 1 φ 1 ∗ ) 2 , (52) with φ 1 and ϕ 1 giv en by eq.(48). Tw o concrete examples of eq.(52) are giv en b elow. (a)F or simplicit y , let a = 2 α 1 2 − 2 β 1 2 + c 2 so that Im( − a 2 − 4 λ 1 4 − 4 λ 1 2 ( c 2 − a )) = 0, then | q [2] | 2 = − 16 α 1 β 1 w 1 cosh( f 1 ) cos( f 2 ) + w 2 sinh ( f 1) sin( f 2) + w 3 w 4 cosh( f 1 ) cos( f 2) + w 5 sinh ( f 1) sin( f 2 ) + w 6 cos(2 f 2) + w 7 cosh(2 f 1) + w 8 + c 2 , (53 ) w 1 = cα 1 ( c 2 − 4 β 1 2 )( c 2 + 4 α 1 2 ) , w 2 = − cβ 1 ( c 2 + 4 α 1 2 )( c 2 − 4 β 1 2 ) , w 3 = 2 α 1 β 1 ( c 2 − 4 β 1 2 )(4 α 1 2 + c 2 ) , w 4 = 8 cα 1 2 β 1 ( c 2 + 4 α 1 2 ) , w 5 = − 8 cα 1 β 1 2 ( c 2 − 4 β 1 2 ) , w 6 = c 2 α 1 2 ( c 2 + 4 α 1 2 ) + c 2 β 1 2 ( c 2 − 4 β 1 2 ) , w 7 = 16 α 1 2 β 1 2 ( α 1 2 + β 1 2 ) , w 8 = c 4 ( α 1 2 − β 1 2 ) + 16 α 1 2 β 1 2 ( α 1 2 − β 1 2 ) + 4 c 2 ( α 1 2 + β 1 2 ) 2 , f 1 = K 1(4 α 1 2 t − 4 β 1 2 t + x ) , f 2 = 4 K 1 α 1 β 1 t, K 1 = q 16 α 1 2 β 1 2 − 4 c 2 α 1 2 + 4 c 2 β 1 2 − c 4 . 14 By letting x → ∞ , t → ∞ , so | q [2] | 2 → c 2 , the tra jectory of this solution is defined explicitly b y x = − 4 α 1 2 t + 4 β 1 2 t, (54) from f 1 = 0 if K 1 2 > 0, and by t = 0 (55) from f 2 = 0 if ( K 1) 2 < 0. According to eq.(53), w e can get the Ma breathers [33 ](time p erio dic breather solution) and t he Akhmediev breathers [34] (space p erio dic breather solution) solution. In general, the solution in eq.(53) ev olv es p erio dically a long t he straigh t line with a certain angle of x axis and t axis. The dyn amical ev olution of | q [2] | 2 in e q.(53) for differen t para meters are plotted in Figur e 3, Figure 4 and Figure 5, whic h give a visual v erification of the three cases of tra jectories. Inspired b y the extensiv e r esearch of rogue w a v e [4 , 34] for the nonlinear Sc hro dinger equation, a limit pro cedure [34] is used to construct ro gue w av e of the DNLS equation in the follow ing. By letting c → − 2 β 1 in (52) w ith Im( − a 2 − 4 λ 1 4 − 4 λ 1 2 ( c 2 − a )) = 0, it b ecomes ro gue w av e q [2] r og ue w av e = r 1 r 2 r 3 r 4 r 5 (56) r 1 = 2 exp (2 i ( α 2 1 + β 2 1 )(2 tα 2 1 + x − 2 tβ 2 1 )) r 2 = β 1 (16 β 2 1 α 2 1 (4 tα 2 1 + x ) 2 + 16 β 4 1 (4 tβ 2 1 − x ) 2 + 8 iβ 2 1 ( x + 4 tα 2 1 − 8 tβ 2 1 ) + 1) r 3 = 2(16 β 2 1 α 2 1 (4 tα 2 1 + x ) 2 + 16 β 4 1 (4 tβ 2 1 − x ) 2 − 8 α 1 β 1 ( x + 4 tα 2 1 − 8 tβ 2 1 ) + 1) × ( − α 1 + 16 β 1 ( β 4 1 − α 4 1 ) t − 4 β 1 ( α 2 1 + β 2 1 ) x + 16 iα 1 β 2 1 ( α 2 1 + β 2 1 ) t − iβ 1 ) − (16 β 2 1 α 2 1 (4 tα 2 1 + x ) 2 + 16 β 4 1 (4 tβ 2 1 − x ) 2 + 8 iβ 2 1 ( x + 4 tα 2 1 − 8 tβ 2 1 ) + 1) × ( α 1 + 16 β 1 ( β 4 1 − α 4 1 ) t − 4 β 1 ( α 2 1 + β 2 1 ) x + 16 iα 1 β 2 1 ( α 2 1 + β 2 1 ) t + β 1 i ) r 4 = α 1 + 16 β 1 ( β 4 1 − α 4 1 ) t − 4 β 1 ( α 2 1 + β 2 1 ) x + 16 iα 1 β 2 1 ( α 2 1 + β 2 1 ) t + β 1 i r 5 = ( − 16 β 2 1 α 2 1 (4 tα 2 1 + x ) 2 − 16 β 4 1 (4 tβ 2 1 − x ) 2 + 8 iβ 2 1 ( x + 4 tα 2 1 − 8 tβ 2 1 ) − 1) 2 By letting x → ∞ , t → ∞ , so | q [2] r og ue w av e | 2 → 4 β 2 1 , the maximu m amplitude of | q [2] r og ue w av e | 2 o ccurs at t = 0 and x = 0 and is equal to 36 β 2 1 ,and the minim um amplitude of | q [2] r og ue w av e | 2 o ccurs at t = ± 3 16 p 3(4 α 2 1 + β 2 1 ) β 1 ( α 2 1 + β 2 1 ) and x = ∓ 9 α 2 1 4 p 3(4 α 2 1 + β 2 1 ) β 1 ( α 2 1 + β 2 1 ) and is equal to 0 . Through Figure 9 and Figure 10 of | q [2] r og ue w av e | 2 , the main features(suc h as large amplitude and lo cal pro p ert y o n (x-t) plane) of the ro g ue w a v e are sho wn. W e ha v e found that | q [2] | 2 in eq.(53) give s the same result of | q [2] r og ue w av e | 2 b y taking limit of c → − 2 β 1 . (b)When a = c 2 2 , from eq.(48 ), it is no t difficult to find that there are t w o sets of collinear eigenfunctions, 1( x, t, λ k )[1 , k ] 1( x, t, λ k )[2 , k ] and 2 ∗ ( x, t, − λ ∗ k )[2 , k ] 2 ∗ ( x, t, − λ ∗ k )[1 , k ] , (57) 2( x, t, λ k )[1 , k ] 2( x, t, λ k )[2 , k ] and 1 ∗ ( x, t, − λ ∗ k )[2 , k ] 1 ∗ ( x, t, − λ ∗ k )[1 , k ] . (58) Therefore, the eigenfunction ψ k asso ciated with λ k for this case is given b y φ k ( x, t, λ k ) ϕ k ( x, t, λ k ) = 1( x, t, λ k )[1 , k ] + 1 ∗ ( x, t, − λ ∗ k )[2 , k ] 1( x, t, λ k )[2 , k ] + 1 ∗ ( x, t, − λ ∗ k )[1 , k ] . (59) 15 Here 1( x, t, λ k )[1 , k ] 1( x, t, λ k )[2 , k ] = exp( i ( λ k 2 x + 2 λ k 4 t + 1 2 c 2 x − 1 4 c 4 t )) ic 2 λ k exp( i ( λ k 2 x + 2 λ k 4 t )) . Under the c hoice in eq.(39) with λ 1 = α 1 + iβ 1 , λ 2 = − α 1 + iβ 1 , a nd the ψ 1 giv en by eq.(59 ), the solution q [2] is given simply from eq. (35) . Figure 6 is plotted f or | q [2] | 2 , which shows the p erio dical ev olution along a straight line on ( x − t ) plane. Case 5.( N = 4). According to the c hoice in eq.(41) with t w o distinct eigen v alues λ 1 = α 1 + iβ 1 , λ 3 = α 3 + iβ 3 , substituting ψ 1 and ψ 3 defined b y eq. (48) in to eq.(35), then the new solution q [4] generated b y 4-fo ld DT is giv en. Its analytical expression is omitted b ecause it is v ery complicated. But | q [4] | 2 are plotted in Figure 7 and 8 to show t he dynamical ev olution on ( x − t ) plane: (a) Let a = 2 α i 2 − 2 β i 2 + c 2 , i = 1 , 3, so that Im( − a 2 − 4 λ i 4 − 4 λ i 2 ( c 2 − a )) = 0, then Figure 7 sho ws in tuitiv ely that t w o breathers may ha v e parallel tr a jectories;(b) Tw o breathers ha v e a n elastic collision so that they can preserv e their profiles after in teraction, whic h is v erified in Figure 8. 4. Conclusions In this pa p er, a detailed deriv a t io n of the DT from the KN system and then the determin an t represen tatio n of the n-fold case are giv en in Theorem 1 and Theorem 2 . Eac h elemen t o f n- fold D T matrix T n is expressed b y the determinan t of eigenfunctions of the sp ectral problem in eq.(6) and eq.(7). The determinan t represen ta tions of the new solution q [ n ] and r [ n ] of the KN system are also give n in eq.(35 ). F urther mor e, b y the sp ecial choice of the eigen v alue λ k and its eigenfunction ψ k to construct T n so t hat q [ n ] = − ( r [ n ] ) ∗ , then the T n is also reduced to the n-fold DT of the D NLS equation and q [ n ] is a solution of the D NLS. T o illustrate our metho d, solutions of fiv e sp ecific cases a re discussed b y a nalytical form ulae and figures. In particular, a complete classification of the solutions o f the D NLS equation generated by one-f o ld DT is giv en in T able 1. By comparing with know n results [24, 25 ] of the DT for t he DNLS equation, our results pro vide fo llowing impro v emen ts: • A detailed deriv ation of t he D T and the determinant represen tation o f T n . This repre- sen ta tion is useful to compute the soliton surfaces of the D NLS equation in the future as w e ha v e done for the NLS eq uation [28]. The rogue w av e and rat ional trav eling w a v e are firstly giv en ab out the DNLS equation. The rational solution has b een used by us in a separate preprin t to construct the rouge wa ve of the v ariable co efficien t DNLS equation [3 5]. • A complete and thorough classification of the solution generated by the one-fold DT. The bright soliton and dark soliton is also classified, whic h is not published b efore. A t the same time, our results sho w the nonlinear and difficult Riccati equations in ref. [25],whic h are tra nsformed from the linear equations of the sp ectral problem, and Seahorse functions are indeed a voidable. Of course, these do no t disaffirm the merits of metho d in ref. [25 ]. • The general solution eq .(48) of the linear partial differen tial equations in s p ectral prob- lem is crucial to get non-trivial solution of the DNLS equation. • The solution in eq.(53 ) is a relativ ely general form of the breather solution of the DNLS, whic h can evolv e p erio dically alo ng a ny straigh t line on ( x − t ) plane b y c ho osing differen t 16 v alues of parameters α 1 , β 1 , c . It has t w o w ell-known reduc tions: Ma breather going p erio dically along t - axis, and Akhmediev breather g oing p erio dically along x -axis. A t last, w e would lik e to men tion the DT [36] of the DNLSI I I. Unlik e the DNLS equation, F an’s results sho w that the k ernel of the one-fold DT of the DNLSI I I is t w o dimensional,and then supp o rt again the necessit y of the separate study o f the three kinds of deriv ative nonlinear Sc hr¨ odinger equation. So w e shall consider the determinan t represen tation of the D T for DNL- SI I and D NLSI I I in the near future. Mor eov er, w e are also interes ted in the p erio dic solutions with a v aria ble amplitude of the DNLS equation. Ac kno wledgmen t s This work is supp orted by the NSF of China un der Grant No.10971 109 and K.C.W ong Magna F und in Nin gb o Univ ersit y . J ingsong He is also sup p orted by Program for NCET under Gran t No.NCET-08-0515. S h uw ei Xu is also supp orted by the Scien tific Researc h F ound ation of Graduate Sc ho ol of Ningb o Univ ersit y . W e thank Prof. Yishen Li(USTC,Hefei, China) for his useful suggestions on the rogue w a ve. Reference s [1] Mj φ lh us , 1 976, On the Mo dulationa l Instability of Hydromag netic W aves Paralle l to the Ma gnetic field, J.Plasma.P hys.16, 32 1-334 [2] S.P .Spangler ,in:T.Hada and H.Ma tsumoto (Eds.), 1 997, Nonlinear W av es and Chaos in Spac e Plasma s, T er rapub,T okio,p.171 [3] M.S.Ruderman, 20 02, DNLS Equatio n for La rge-a mplitude Solitons P ropaga ting in an Arbitr ary Dir ection in a High- β H all plas ma, J . P lasma. P hys. 67, 271- 276 [4] V. F edun, M.S.Ruderman and R. Er d´ e lyi, 200 8, Generation of Short-lived La rge-a mplitude Magnetohydro- dynamic pulses by dispersive fo cusing, Phys. Lett.A.372 , 6107 -6110 ; M.S. Ruderman, 2010, F reak w av es in La b o ratory and Space plasmas F r eak wav es in plasmas, The Euro pe a n P hysical Jour 1 85, 5 7-66 [5] G. Sanchez-Arriag a, J. R. Sa nmartin and S. A. Elas k ar ,2 007, Damping mo dels in the truncated Deriv ative Nonlinear Schr¨ oding er Equation, Physics of Pla smas 1 4, 082 108; G. S´ a nchez-Arriag a, T. Hada and Y. Nariyuki, 2 009, The truncation mo del of the Deriv ative Nonlinear Schr¨ odinger Equation, P hysics of Plasmas 16, 04 2302 [6] G. S ´ a nchez-Arriag a , 201 0, Alfv en soliton and m ultisoliton dynamics p erturb ed by Nonlinear Landa u damp- ing, P hysics of Plasmas 17, 08231 3 [7] N.Tzoar a nd M.Jain, 198 1, Self-phas e Mo dulation in long- geometry optical wav e guide, Phys.Rev.A. 23, 1266- 1270 [8] D. Anderso n and M. Lisak ,1983, Nonlinear Asymmetric Self-phase modulatio n and self-steep ening o f pulses in long O ptical W av eguides, Phys. Rev. A. 27, 139 3-139 8 [9] P .A.Govind, Nonlinear Fib ers Optics 3r d edn(New Y ork: Adademic,2 001) [10] D. J. Kaup and A. C. New ell, 1978 , An exa ct solution for a Deriv ativ e Nonlinear Schr¨ o ding er equatio n J.Math.Phys.19, 798-8 01 [11] T. K aw ata, N. Ko bay ashi a nd H.Inoue, 1979 , Soliton solution o f the Deriv ative Nolinear Schr¨ odinger equation, J. Phys. So c. Japan 46,1 008-1 015 [12] Nian-Ning Huang and Zong-Y un Chen, 1 990, Alfv en solitons , J .P hys.A: Math.Gen. 2 3, 439-4 53 [13] Guo-Quan Zhou and Nian-Ning Huang, 20 07, An N-soliton solution to the DNLS equa tion based on revised inv er se sca ttering tra nsform, J.Phys.A: Math.Theor.40, 1360 7C136 2 3 [14] Huang Nian Ning, 2 007, Marchenk o Equation for the Deriv ative Nonlinear Schr¨ o dinger E q uation, Chin. Phys. Lett. 2 4, 894-8 97 [15] He Jin-Chun, Chen Zong -Y un, 2008, Comment on Revision o f K aup Newell’s W orks on IST for DNLS Equation, Co mmun . Theor . Phys. (Beijing, China ) 50, 1369-1 374 [16] Y ang C hun-Nuan, Y u Jia-Lu, Cai Hao and Huang Nian-Ning, 20 08, Inv erse Scattering T ransfor m for th e Deriv ative Nonlinea r Schr¨ o dinger E quation, Chin. Phys. Lett. 25 , 421 -424. [17] Y.H. Ichik a wa and S. W atanab e, 1 977, Solito ns and env elop e solito ns in collissionless plasma s, J. Phys. (Paris) 38, C6-C15 17 [18] T. Ka wata a nd H. Inoue, 1 978, Exa ct solutions of the Deriv ative Nonlinea r Schr¨ oding er Equation under the Nonv anishing Conditions, J . P hys. So c. Japan 44,19 68-19 76. [19] Y oshi H.Ic hik awa,Kimiaki Konno, Miki W adati a nd Heiji Sanuki 19 80, Spiky soliton in Circ ular Polarized Alfv ´ en wav e, J. Phys. So c. Japan.48 , 279 - 286 [20] Xiang-Jun Chen and W a Kun Lam, 2 004, In verse scattering tra nsform for the Deriv ative Nonlinear Schr¨ odinger E quation with nonv anishing bo undary co nditions, Phys.Rev.E.69, 06 6604 [21] V.M. Lashkin, 20 07, N-soliton solutions a nd p er tur bation theor y for the Deriv ative Nonlinear Schr¨ odinger Equation with no nv a nishing bo undary conditions, J. Phys. A: Math. Theo r.40, 61 19-61 32 [22] Hao Cai and Nian-Ning Huang ,2 006, T he Hamiltonian formalis m o f the DNLS equation with a no nv a nished bo undary v alue, J.Phys.A: Math.Gen.3 9, 5 007- 5014 [23] Kak ei S, Sasa N and Sa tsuma, 1 995, B ilinearization o f a Gener alized Deriv ative Nonlinear Schr¨ odinger equation, J. Phys. So c. Japan.64 , 151 9-152 6 [24] Kenji Imai, 19 99, Generlizatio n of Kaup-Newell Inverse Scattering F ormulation and Darb o ux T ransforma- tion, J .Phys.Soc.Ja pan.68, 35 5 -359 [25] H Steudel, 2003 , The hier arch y of multi-soliton solutions of the Deriv ative Nonlinear Schr¨ odinger Equa- tion,J.Phys.A: Math.Gen.36, 1931 C1946 [26] G.Neugebauer and R.Meinel, 1984 , General N-so liton s olution of the AKNS c la ss on arbitra ry background, Phys.Lett.A.100, 467 C4 70. [27] V. B. Matveev, M.A. Salle,19 91, Dar b oux T r ansfromations a nd Solito ns(Springer-V erlag, Ber lin) [28] J.S.He, L .Z hang, Y.Cheng and Y.S.Li, 2 006, Determina nt r epresentation of Dar bo ux tra nsformation fo r the AKNS sy stem, Science in China Series A: Mathematics .1 2, 18 67C18 78 [29] M. J. Ablowitz,D. J. K aup, A. C. Newell and H. Segur 1973 ,Nonlinear Evolution Equations of Physical significance, Phys. Rev. Lett. 31, 1 25-12 7; M.J. Ablowitz and P . A. Clarkso n, 1991, Solitons, Nonlinear evolution equations and In verse sca ttering (Cambridge: Cambridge Universit y P r ess) [30] M. W adati a nd K. Sogo, 19 83, Gauge T r ansforma tio ns in Soliton Theor y , J . Phys. Soc. Japan. 52, 3 9 4-33 8 [31] H.H. Chen,Y.C.Lee a nd C.S. Liu, 197 9 , In tegrability of Nonlinea r Hamiltonian Systems b y In verse Scat- tering Metho d, Phys.Scr.20, 490 - 492 [32] V.S.Gerdjik ov and I.Iv anov, 1983, A Quadra tic Pencil o f General T yp e and Nonlinear Evolution Equatio ns. II. Hierarc hies of Hamiltonian structure s, J . Phys. Bulgar. 10, 130C1 43 [33] Y.C. -Ma,197 9, The Perturb ed plane-wav e solutions of the Cubic Schr¨ odinger equation, Stud. Appl. Math.60,43 C5 8 [34] N.N.A khmediev and V.I.Ko rneev,198 6, Modulation instabilit y a nd per io dic solutio ns of the Nonlinear Schr¨ odinger equation, Theor. Math. Ph ys. 69, 1080- 1 093; N. Akhmediev, J. M. Soto-Cresp o and A. Ankiewicz, 2 009, Ex tr eme wa ves that app ear fro m nowhere: O n the nature of r ogue wa ves, Phys. Lett. A. 373, 2 137- 2145. [35] Jingsong He,Shu w ei Xu,Lihong W ang, The Rogue wa ve of the V ariable Co efficient Deriv a tive Nonlinear Schrodinger equation(in prepara tion 201 1) [36] Engui F an, 2000 , Darb oux trans fo rmation a nd Soliton- like s olutions for the Ger djikov-Iv anov eq ua tion, J . Phys. A: Ma th. Gen. 33, 692 5C6933 18 Figure 3. The dynamical evolution of | q [2] | 2 ( time perio dic breather) in eq.(53) on ( x − t ) plane with sp ecific parameters α 1 = β 1 , β 1 = 0 . 5 , c = 0 . 8 . The tra jectory is a line x = 0. 19 Figure 4. The dynamical ev o lut io n of | q [2] | 2 ( space p erio dic breather) in eq.(53) on ( x − t ) plane with sp ecific parameters α 1 = β 1 , β 1 = 0 . 5 , c = 1 . 5 . The tra jectory is a line t = 0. Figure 5. The dynamical ev olution o f solution | q [2] | 2 in eq.(53) for case 4(a). It ev olv es perio dically along a straigh t line with certain angle of x axis and t axis under sp ecific parameters α 1 = 0 . 65 , β 1 = 0 . 5 , c = 0 . 95. Figure 6. The dynamical ev olution of | q [2] | 2 in case 4(b) on ( x − t ) plane with sp ecific parameters α 1 = 0 . 5 , β 1 = 0 . 35 , c = 0 . 85. It ev olves p erio dically along a straigh t line on ( x − t ) plane. 20 Figure 7. The dynamical ev olution of p erio dic breather solution giv en b y case 5(a) on ( x − t ) plane with sp ecific parameters α 1 = 0 . 5 , β 1 = 0 . 6 , c = 0 . 5 , α 3 = 0 . 6 , β 3 = 1 10 √ 47. This picture shows tw o breathers ma y parallelly propagat e on ( x − t ) plane. Figure 8. The dynamical ev olution of p erio dic breather solution giv en b y case 5(b) on ( x − t ) plane with sp ecific parameters a = c 2 2 , α 1 = − 0 . 5 , β 1 = 0 . 5 , α 3 = 0 . 6 , β 3 = 0 . 5 , c = 0 . 95. This picture show s the elastic in teraction of the t wo breathers. Figure 9. The dynamical evolution of | q [2] r og ue w av e | 2 giv en b y eq.(56) on ( x − t ) plane with specific pa r a meters α 1 = 1 2 , β 1 = 1 2 .By letting x → ∞ , t → ∞ , so | q [2] r og ue w av e | 2 → 1, the maxim um amplitude of | q [2] r og ue w av e | 2 o ccurs at t = 0 and x = 0 and is equal to 9,a nd the minimum amplitude of | q [2] r og ue w av e | 2 o ccurs at t = ± √ 15 10 and x = ∓ 3 √ 15 10 and is equal to 0. 21 Figure 10. Con tour plot of the w a v e amplitudes of | q [2] r og ue w ave | 2 in the ( x − t ) plane is given b y eq.(56) for α 1 = 1 2 , β 1 = 1 2 . 22
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment