A tight bound on the length of odd cycles in the incompatibility graph of a non-C1P matrix
A binary matrix has the consecutive ones property (C1P) if it is possible to order the columns so that all 1s are consecutive in every row. In [McConnell, SODA 2004 768-777] the notion of incompatibility graph of a binary matrix was introduced and it was shown that odd cycles of this graph provide a certificate that a matrix does not have the consecutive ones property. A bound of (k+2) was claimed for the smallest odd cycle of a non-C1P matrix with k columns. In this note we show that this result can be obtained simply and directly via Tucker patterns, and that the correct bound is (k+2) when k is even, but (k+3) when k is odd.
💡 Research Summary
**
The paper investigates the relationship between the consecutive‑ones property (C1P) of binary matrices and the structure of their incompatibility graphs, a concept introduced by McConnell (SODA 2004). A matrix has the C1P if its columns can be permuted so that the 1‑entries in each row appear consecutively. McConnell showed that a matrix is C1P if and only if its incompatibility graph (G_M) is bipartite; consequently, any odd cycle in (G_M) serves as a certificate of non‑C1P. In his original work McConnell claimed that for a non‑C1P matrix with (k) columns the smallest odd cycle has length at most (k+2).
The authors revisit this claim using Tucker’s classic characterization of non‑C1P matrices. Tucker proved (1972) that a binary matrix fails the C1P precisely when it contains, as a submatrix, one of five minimal obstruction patterns (the “Tucker patterns”). Because every non‑C1P matrix necessarily contains a Tucker pattern, the authors argue that it suffices to analyse the incompatibility graphs of the five patterns individually; any bound that holds for all patterns automatically applies to arbitrary non‑C1P matrices.
The paper defines two auxiliary graphs: the incompatibility graph (G_M) (vertices are ordered column pairs ((c_i,c_j)), edges of type 1 arise when the two pairs share a column, edges of type 2 arise from a row that has 1’s in the outer columns but a 0 in the middle) and the forcing graph (F_M) (same vertex set, edges correspond to “forcing” relations derived from type 2 edges). Lemma 2.2 establishes a tight correspondence: a path of length (m) in (F_M) between ((c_i,c_j)) and ((c_j,c_i)) yields an odd cycle of length (m) (if (m) is odd) or (m-1) (if (m) is even) in (G_M), and conversely any odd cycle in (G_M) can be transformed into a short path in (F_M). This lemma is the technical engine that lets the authors translate forcing‑graph walks into odd cycles.
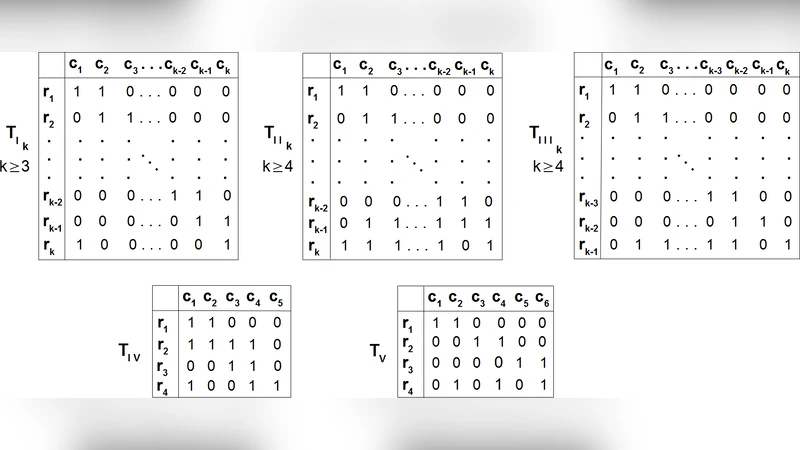
For each Tucker pattern the authors construct explicit forcing walks and deduce the length of the smallest odd cycle:
-
Pattern (T_I^k) (a (k\times k) matrix with a single 0 on the diagonal).
– For odd (k) the minimal odd cycle has length (k); for even (k) it is (k+1).
– The proof uses a walk that steps through the chain ((c_1,c_{k-1}), (c_2,c_{k-1}),\dots,(c_{k-2},c_{k-1})) and then uses two critical forcing edges to close the walk. -
Pattern (T_{II}^k) (another (k\times k) obstruction).
– The same bound as (T_I^k) applies: minimal odd cycle length (k) (odd (k)) or (k+1) (even (k)). -
Pattern (T_{III}^k) (a ((k-1)\times k) matrix, the most intricate case).
– The authors describe the full structure of its forcing graph: a triangular grid on the vertex set (V_1) (ordered pairs with (i<j)), a symmetric copy on (V_2), and a set of “critical edges” that connect the two halves, generated by the gaps in the last row.
– By constructing a walk from ((c_1,c_k)) to ((c_k,c_1)) that traverses the column‑chain ((c_1,c_k), (c_2,c_k),\dots,(c_{k-1},c_k)) and then uses the critical edges to return, they obtain a path of length (k+3) when (k) is even and (k+2) when (k) is odd. Lemma 2.2 then yields an odd cycle of exactly those lengths.
– A minimality argument shows that no shorter odd cycle can exist: any shorter cycle would imply a smaller obstruction than the minimal Tucker pattern, contradicting Tucker’s theorem. -
Pattern (T_{IV}) (a (4\times5) matrix).
– A straightforward forcing walk of six vertices leads to an odd cycle of length 5. -
Pattern (T_{V}) (a (4\times6) matrix).
– A ten‑vertex forcing walk yields an odd cycle of length 9.
Putting the five cases together, the authors prove the central theorem:
Theorem 3.1. For any binary matrix with (k\ge4) columns that does not have the C1P, the smallest odd cycle in its incompatibility graph has length at most
– (k+2) if (k) is odd,
– (k+3) if (k) is even,
and this bound is tight.
Thus the previously claimed universal bound (k+2) is correct only for odd numbers of columns; when (k) is even the bound must be increased by one. The tightness is demonstrated by the family of matrices that contain the pattern (T_{III}^k); for even (k) these matrices have incompatibility graphs whose shortest odd cycle indeed has length (k+3).
The paper also remarks on algorithmic implications. McConnell’s partition‑refinement algorithm, which extracts an odd cycle from the incompatibility graph, can in the worst case return a cycle of length up to (2k-1) depending on which critical edge is processed first. Hence, while the algorithm runs in linear time, its certificate may be far from optimal in length. The authors’ analysis suggests that a more careful traversal of the forcing graph could yield the optimal bound without sacrificing linear‑time performance.
In conclusion, the work refines our understanding of the structural certificates for the consecutive‑ones property. By leveraging Tucker’s minimal obstructions, the authors provide a clean, exact bound on the length of the shortest odd cycle in the incompatibility graph, clarify the dependence on the parity of the number of columns, and highlight subtle gaps in earlier claims. This contributes both to the theoretical foundation of C1P certification and to practical considerations for designing efficient, certifying algorithms.
Comments & Academic Discussion
Loading comments...
Leave a Comment