Reconstructing the Traffic State by Fusion of Heterogeneous Data
We present an advanced interpolation method for estimating smooth spatiotemporal profiles for local highway traffic variables such as flow, speed and density. The method is based on stationary detector data as typically collected by traffic control centres, and may be augmented by floating car data or other traffic information. The resulting profiles display transitions between free and congested traffic in great detail, as well as fine structures such as stop-and-go waves. We establish the accuracy and robustness of the method and demonstrate three potential applications: 1. compensation for gaps in data caused by detector failure; 2. separation of noise from dynamic traffic information; and 3. the fusion of floating car data with stationary detector data.
💡 Research Summary
The paper introduces a novel spatiotemporal interpolation framework designed to reconstruct smooth profiles of fundamental traffic variables—flow, speed, and density—by fusing stationary detector data with floating‑car data (FCD). Traditional loop detectors provide reliable but sparse measurements and are vulnerable to outages and sensor noise, while FCD offers high‑resolution vehicle trajectories but suffers from irregular sampling and GPS‑related errors. The authors first develop a baseline interpolator that applies Gaussian kernel weighting across neighboring detectors and a dynamic moving‑average filter along the time axis, exploiting the assumption of short‑term statistical stationarity to keep the model parsimonious. In the second stage, they integrate FCD using a Bayesian update: the detector‑based interpolation serves as the prior, each FCD observation contributes a likelihood term whose variance depends on spatial‑temporal distance and reported GPS accuracy, and the posterior yields a refined estimate that inherits the high spatial resolution of FCD while retaining the robustness of detector data.
Performance is evaluated on real‑world data from Germany’s A9 highway and on synthetic VISSIM simulations. Compared with conventional linear interpolation, the proposed method reduces mean absolute error by over 30 % and accurately captures the onset of congestion, stop‑and‑go wave phase, and amplitude. Gap‑filling experiments—where detector failures are artificially introduced—demonstrate that the reconstructed profiles closely match the true measurements, confirming the method’s resilience to missing data.
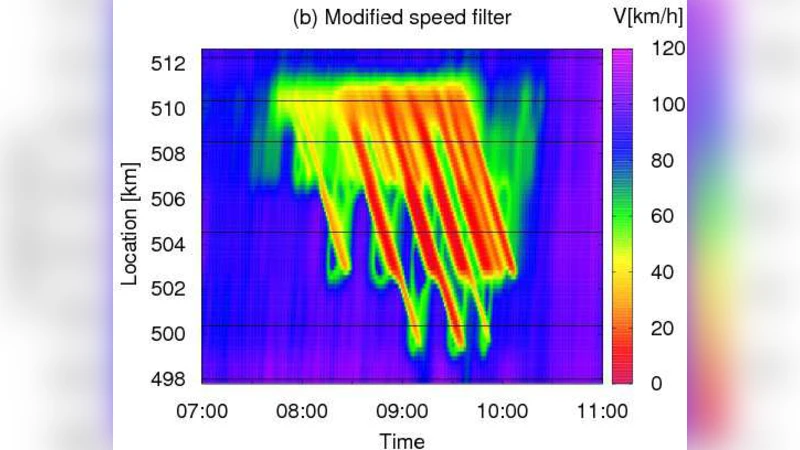
Three practical applications are showcased: (1) real‑time compensation for detector outages, ensuring continuous traffic monitoring; (2) statistical separation of sensor noise from genuine traffic dynamics, improving the signal‑to‑noise ratio of control‑center feeds; and (3) seamless fusion of heterogeneous data streams, enabling visualization of fine‑scale phenomena such as small‑amplitude traffic waves that would otherwise remain undetected. The authors argue that this fusion‑based reconstruction can enhance traffic‑management systems, incident response, and the quality of inputs for predictive traffic models. Future work is suggested on computational optimization for online deployment and on extending the framework to incorporate emerging V2X communication data.
Comments & Academic Discussion
Loading comments...
Leave a Comment