Exploiting the Passive Dynamics of a Compliant Leg to Develop Gait Transitions
In the area of bipedal locomotion, the spring loaded inverted pendulum (SLIP) model has been proposed as a unified framework to explain the dynamics of a wide variety of gaits. In this paper, we present a novel analysis of the mathematical model and its dynamical properties. We use the perspective of hybrid dynamical systems to study the dynamics and define concepts such as partial stability and viability. With this approach, on the one hand, we identified stable and unstable regions of locomotion. On the other hand, we found ways to exploit the unstable regions of locomotion to induce gait transitions at a constant energy regime. Additionally, we show that simple non-constant angle of attack control policies can render the system almost always stable.
💡 Research Summary
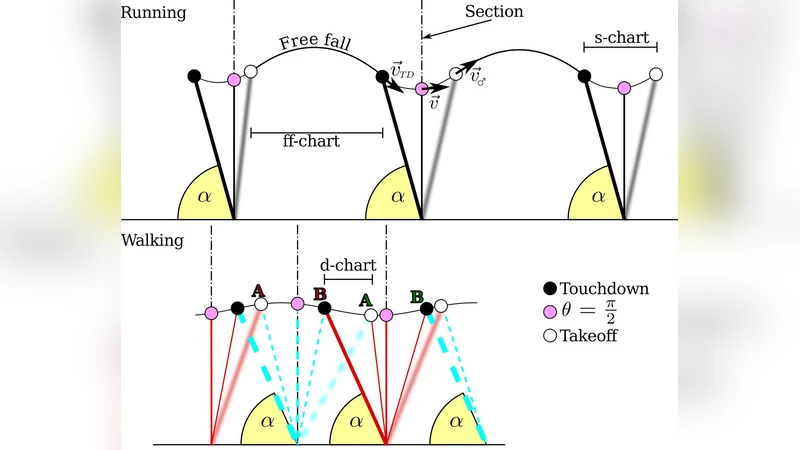
The paper revisits the Spring‑Loaded Inverted Pendulum (SLIP) model—a cornerstone in the study of bipedal locomotion—through the lens of hybrid dynamical systems. By decomposing the continuous dynamics into three “charts” (flight, single‑stance, and double‑stance) and defining discrete transitions via event functions (e.g., touchdown angle, spring rest length), the authors construct two discrete maps, Rα and Wα, that capture running and walking respectively when the system state is observed on the section S (θ = π/2).
Two novel analytical concepts are introduced: Finite Stability and Viability. Finite Stability describes the set of initial conditions that can survive a finite number n of successive map applications under a constant angle‑of‑attack policy (CAAP). Viability quantifies how large an interval of admissible attack angles Δα exists for a given state such that the next step does not lead to failure. Together, these notions allow the identification of “transition regions” where a state lying in an unstable finite‑stability set can be steered into a stable invariant set (E_i^∞) by appropriately choosing the attack angle.
The authors conduct extensive simulations at a fixed total mechanical energy of 820 J (mass = 80 kg, spring stiffness = 15 kN/m, rest length = 1 m). The state space on S is sampled using a Delaunay triangular mesh containing roughly 66 000 vertices. For each vertex, the maps Rα and Wα are evaluated over 400 uniformly spaced attack angles between 55° and 90°, and the resulting trajectories are integrated with MATLAB/Octave’s ode45 solver (tolerances 1e‑6/1e‑8). Bilinear interpolation within mesh triangles provides a continuous approximation of the discrete maps.
Key findings include:
- Finite Stability – Running (R) can sustain on average about 10 steps before failure, while both “ground‑reflected running” (GR) and walking (W) can achieve up to 25 steps, indicating broader basins of attraction for the latter two.
- Viability – For most initial conditions, a viable angle interval of at least 2° exists, suggesting that realistic actuator resolution and sensor noise would still permit successful control.
- Transition Mechanism – By selecting a first attack angle that maps a state from an unstable finite‑stability region into the stable invariant set, and a second angle that keeps the system within that set, the authors demonstrate that virtually any point on S can be stabilized in just two control actions.
- Transition Paths – Four fundamental gait transitions are identified (R → GR, GR → W, W → GR, W → R). Transition regions are visualized as colored patches where Δα ≥ 2°, and the required angle sequences are explicitly listed for representative trajectories (e.g., a 26‑step sequence with a specific angle schedule).
The study overturns the prevailing belief—derived from earlier SLIP analyses—that multiple gaits cannot coexist at the same energy level because their self‑stable regions are disjoint. By allowing the attack angle to vary rather than remain fixed, the authors exploit the inherent passive dynamics of the compliant leg to achieve smooth, energy‑conserving gait switches. This insight has immediate implications for the design of energy‑efficient bipedal robots, exoskeletons, and rehabilitation devices, where minimal actuation during the swing phase is desirable and rapid mode switching is required. Moreover, the concepts of finite stability and viability provide a general analytical framework for assessing safety and controllability in other hybrid mechanical systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment