Understanding 3-manifolds in the context of permutations
We demonstrate how a 3-manifold, a Heegaard diagram, and a group presentation can each be interpreted as a pair of signed permutations in the symmetric group $S_d.$ We demonstrate the power of permutation data in programming and discuss an algorithm we have developed that takes the permutation data as input and determines whether the data represents a closed 3-manifold. We therefore have an invariant of groups, that is given any group presentation, we can determine if that fixed presentation presents a closed 3-manifold. (The proposed techniques begin with a pair of signed permutations and builds a finite group presentation. The finite group presentation results in a finite class of associated 3-manifolds. Notice that a negative answer only implies the fixed presentation does not result in a closed 3-manifold under this construction, but says nothing about an isomorphic form of the group presentation.)
💡 Research Summary
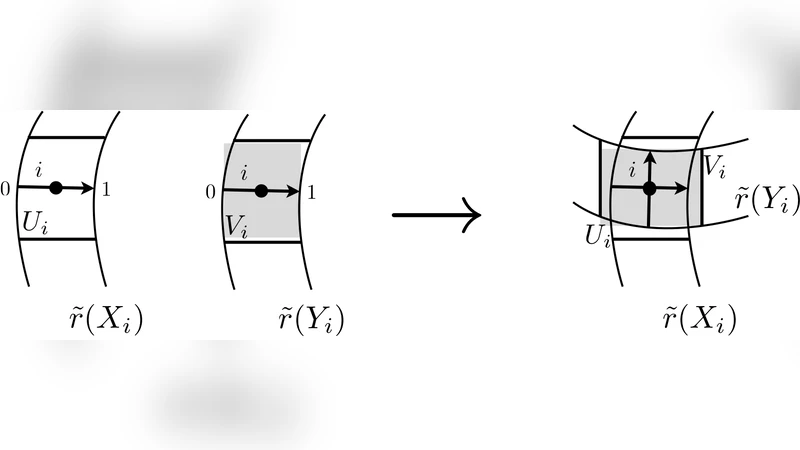
The paper establishes a concrete correspondence between closed 3‑manifolds, Heegaard diagrams, and finite group presentations by encoding each structure as a pair of signed permutations in the symmetric group Sₙ. Starting from a Heegaard splitting (S; X, Y), the authors label every intersection point of the X‑ and Y‑curves, producing two permutations α and β that record the cyclic order of intersections along each curve. A sign function ε: {1,…,d}→{±1} records the orientation of each crossing, yielding a “permutation data set” (α, β, ε).
They show how to reconstruct the group presentation directly from this data: each cycle of β determines a relator, the entries of α identify the generators involved, and ε supplies the exponent signs. Conversely, given a presentation P = ⟨x₁,…,x_m | r₁,…,r_n⟩, one can build a finite family P_d(P) of permutation data sets by fixing α according to the total number of occurrences of each generator and then enumerating all possible ways of arranging the corresponding entries into β‑cycles while preserving the crossing signs. Different choices of β produce distinct Heegaard diagrams and therefore potentially different 3‑manifolds, but all lie in a finite class associated with P.
The central algorithmic contribution is a method to decide whether a particular permutation data set yields a closed manifold. From (α, β, ε) the authors construct a “ribbon diagram” that thickens the curves into a surface with boundary; capping off the boundary components produces the splitting surface S. The manifold is closed precisely when the complement S − X (or equivalently S − Y) is planar, i.e., has a planar embedding without handles. This planarity test reduces to a standard graph‑planarity algorithm (e.g., Hopcroft‑Tarjan) and runs in polynomial time in d. Lemma 7.4 proves the equivalence between planarity of S − X and the absence of boundary components in the resulting 3‑manifold.
Thus, given any finite presentation, one can algorithmically generate all associated permutation data sets, test each for planarity, and thereby determine whether the presentation can arise from a closed 3‑manifold under the described construction. A negative answer only rules out the specific encoding; the presentation might still present a closed 3‑manifold after a different choice of generators or relators. The work extends earlier ideas of Montesinos and Hempel, providing a fully implementable decision procedure and highlighting the power of permutation data for computational 3‑manifold topology.
Comments & Academic Discussion
Loading comments...
Leave a Comment