Multi-robot Deployment From LTL Specifications with Reduced Communication
In this paper, we develop a computational framework for fully automatic deployment of a team of unicycles from a global specification given as an LTL formula over some regions of interest. Our hierarchical approach consists of four steps: (i) the construction of finite abstractions for the motions of each robot, (ii) the parallel composition of the abstractions, (iii) the generation of a satisfying motion of the team; (iv) mapping this motion to individual robot control and communication strategies. The main result of the paper is an algorithm to reduce the amount of inter-robot communication during the fourth step of the procedure.
💡 Research Summary
The paper presents a complete, automated framework for deploying a team of identical unicycle robots so that their collective motion satisfies a global specification expressed in Linear Temporal Logic (LTL). The authors adopt a hierarchical, four‑step methodology.
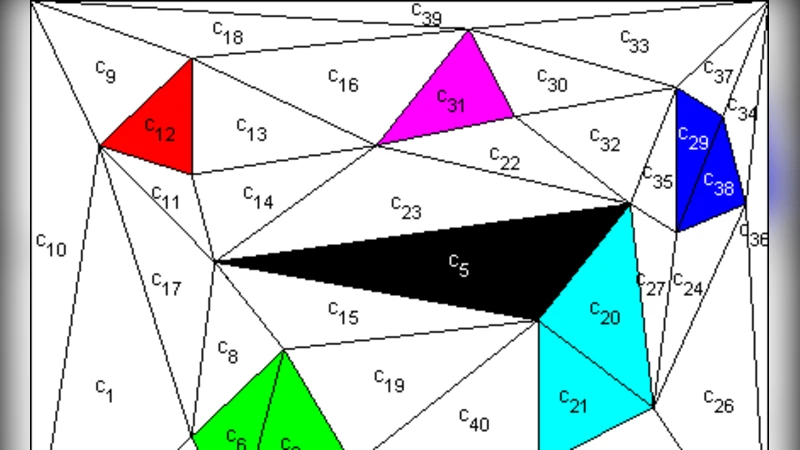
First, each robot is abstracted into a deterministic finite transition system. The continuous planar environment is partitioned into convex polygonal cells (triangulation or polytopal decomposition). The robot’s “reference point” (the nose) is treated as a fully actuated point, and a non‑singular mapping converts reference‑point velocities into the original unicycle controls. Within each cell, linear programming is used to synthesize feedback vector fields that guarantee invariance (self‑loops) or finite‑time reachability to adjacent cells. Consequently, every cell becomes a state of the transition system, and adjacency defines the transition relation. Observations label cells with the relevant region propositions (π₁,…,π_k) or a dummy label for non‑interest space.
Second, the individual transition systems are synchronously composed into a global product system T_G that captures the simultaneous evolution of all robots. The LTL‑X specification φ is translated into a (generalized) Büchi automaton B_φ, and the product T_G × B_φ is constructed. A model‑checking search yields an accepting run, which can be expressed in a prefix‑suffix form: a finite prefix followed by an infinitely repeating loop. This run defines a sequence of cell visits for the whole team that satisfies φ.
Third, the authors address the major practical limitation of synchronous products—excessive inter‑robot communication. In a naïve implementation, robots would need to exchange state information at every cell transition. The paper introduces a heuristic algorithm that scans the accepting run and selects a reduced set of synchronization moments. A synchronization point is required only when multiple robots must leave their current cells simultaneously or when the LTL formula imposes a joint condition (e.g., “π₁ ∧ π₄ ∧ π₆ must hold together”). The algorithm does not guarantee a globally minimal set, but it can be extended to compute minimal synchronization sets. Empirical results show a reduction of up to 70 % in communication events compared with the baseline.
Fourth, the reduced synchronization schedule is mapped back to concrete control and communication strategies for each robot. Within a cell, the robot follows the pre‑computed feedback vector field; when a scheduled synchronization point is reached, robots broadcast their current cell identifiers and jointly decide the next transition. Because communication occurs only at selected moments, bandwidth usage and latency sensitivity are dramatically lowered, making the approach suitable for larger teams and limited‑bandwidth networks.
All steps are integrated into a user‑friendly software tool (available at the authors’ website). The tool accepts as input: (i) a polygonal description of the environment, (ii) an LTL‑X formula over the set of regions of interest, (iii) the number of robots, and (iv) forward and angular velocity bounds. It automatically performs triangulation, constructs the per‑robot transition systems, carries out LTL‑to‑Büchi conversion, computes the global accepting run, applies the communication‑reduction algorithm, and finally outputs per‑robot feedback control laws and a schedule of synchronization events.
The paper validates the methodology with a case study involving three unicycles navigating a workspace partitioned into six regions. The specification requires simultaneous visitation of regions {π₁,π₄,π₆}, then {π₂,π₅}, repeatedly, while always avoiding π₃. The environment is divided into 40 triangular cells, yielding three identical transition systems. The algorithm finds an accepting run and reduces the number of required synchronizations from 120 (baseline) to 35, while still guaranteeing that the infinite word generated by the team satisfies the LTL formula.
Key contributions include: (1) a systematic pipeline that bridges formal methods (LTL, Büchi automata) with low‑level feedback control for non‑holonomic robots; (2) a practical heuristic for minimizing inter‑robot communication in the context of synchronous product models; (3) an open‑source implementation that demonstrates scalability and reproducibility. Limitations are acknowledged: the communication‑reduction algorithm is heuristic rather than optimal, the approach assumes identical robots and cell‑based motion abstractions, and robustness to communication delays or packet loss is not addressed. Future work may focus on exact minimal synchronization computation, extensions to heterogeneous robot teams, and incorporation of stochastic network models.
Comments & Academic Discussion
Loading comments...
Leave a Comment