Multi-Modal Local Sensing and Communication for Collective Underwater Systems
This paper is devoted to local sensing and communication for collective underwater systems used in networked and swarm modes. It is demonstrated that a specific combination of modal and sub-modal communication, used simultaneously for robot-robot and robot-object detection, can create a dedicated cooperation between multiple AUVs. These technologies, platforms and experiments are shortly described, and allow us to make a conclusion about useful combinations of different signaling approaches for collective underwater systems.
💡 Research Summary
The paper addresses the challenge of enabling cooperative behavior among multiple autonomous underwater vehicles (AUVs) operating in swarm or networked modes by focusing on local sensing and communication (S&C). Recognizing that long‑range acoustic modems are bandwidth‑limited and that radio waves suffer severe attenuation underwater, the authors explore a multi‑modal approach that combines several short‑range physical media—optical (both blue and infrared), electric fields, and, for completeness, sonar and radio.
Table I quantitatively compares these modalities in terms of attenuation, antenna/LED size, and achievable range. Infrared (≈800 nm) provides only a few decimetres of range but supports reliable digital PCM transmission at 4 kbps, while blue light (≈460 nm) reaches over a metre with low attenuation, making it suitable for gradient‑based “optical pheromone” navigation. Electric‑field communication, inspired by weakly electric fish, works within about one metre using tiny electrodes, offering analog signaling and direction estimation through vector field measurements.
The authors implement three hardware platforms to validate the concept. The first, developed in the AquaJelly project, equips a 10–15 cm robot with 11 IR transceivers and six blue LEDs arranged in a ring. IR channels deliver short‑range, bidirectional digital messages (robot IDs, collision alerts) within ~0.5 m, while the blue LEDs emit continuously, creating an omnidirectional light field that robots can sense as a gradient for coarse positioning and collective motion. A time‑division scheme (≈95 % listening, 5 % transmitting) enables robust collision avoidance and docking behaviors.
A second platform refines the optical system by using only modulated blue light. Experiments at 119 kbps with Quadrature Amplitude Modulation (QAM) achieve up to 120 cm communication distance and 7–12 cm distance‑measurement accuracy. By dynamically adjusting the programmable gain amplifier, an “active sensing” algorithm estimates inter‑robot distance while maintaining the communication link, allowing robots to approach each other with precise control.
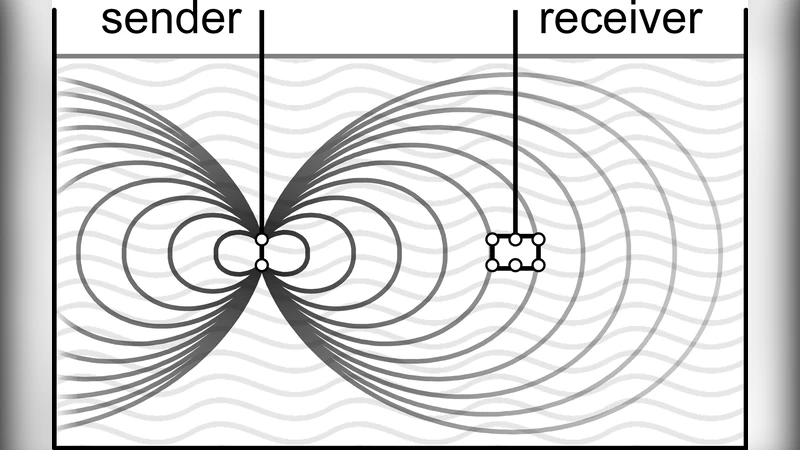
The third platform explores electric‑field S&C. A dipole emitter driven at 2.5 kHz creates a spatially decaying field; four receiver electrodes measure differential voltages. By applying the derived equations, the system extracts both bearing and range to the sender, provided the electrodes share a common orientation and lie roughly in the same plane. Laboratory tests confirm reliable detection within 0.5 m, though three‑dimensional misalignment remains a design challenge.
Behavioral experiments demonstrate the practical benefits of each modality. The bi‑modal optical system enables collective decision‑making during docking, with IR identifying individual robots and blue light providing a shared environmental cue. The single‑modality blue‑light system supports precise distance‑based coordination, while the electric‑field system offers a low‑power alternative for very close‑range interactions.
In the concluding discussion, the authors argue that a hybrid S&C architecture—using IR/electric fields for sub‑decimetre precision, blue light for metre‑scale gradient navigation and moderate‑bandwidth data exchange, and optionally acoustic or radio for occasional long‑range messages—optimally balances energy consumption, hardware size, and robustness. Such multi‑modal local S&C is presented as a scalable foundation for future large‑scale underwater swarms, enabling more sophisticated cooperative missions without relying on bulky acoustic modems.
Comments & Academic Discussion
Loading comments...
Leave a Comment