Network Localization on Unit Disk Graphs
We study the problem of cooperative localization of a large network of nodes in integer-coordinated unit disk graphs, a simplified but useful version of general random graph. Exploiting the property that the radius $r$ sets clear cut on the connectivity of two nodes, we propose an essential philosophy that “no connectivity is also useful information just like the information being connected” in unit disk graphs. Exercising this philosophy, we show that the conventional network localization problem can be re-formulated to significantly reduce the search space, and that global rigidity, a necessary and sufficient condition for the existence of unique solution in general graphs, is no longer necessary. While the problem is still NP-hard, we show that a (depth-first) tree-search algorithm with memory O(N) ($N$ is the network size) can be developed, and for practical setups, the search complexity and speed is very manageable, and is magnitudes less than the conventional problem, especially when the graph is sparse or when only very limited anchor nodes are available.
💡 Research Summary
The paper addresses cooperative localization of wireless sensor networks in scenarios where GPS is unavailable or impractical. Traditional multi‑hop localization methods rely on distance measurements (TOA, AOA, RSS) and assume that a non‑anchor node must be directly connected to at least three non‑collinear anchors, or that the underlying graph satisfies global rigidity, in order to guarantee a unique embedding. These assumptions, however, become limiting when the network is sparse, the communication radius is small, or only a few anchors are present, because the search space for possible node positions grows exponentially and the problem remains NP‑hard.
To overcome these limitations, the authors model the network as a unit‑disk graph (UDG) with a uniform communication radius r and restrict all node coordinates to integer points on a grid. The UDG model enforces a binary connectivity rule: two nodes are linked if and only if their Euclidean distance is ≤ r; otherwise they are guaranteed to be farther than r. By scaling real distances to integers, the authors preserve the essential combinatorial structure while making the set of feasible positions finite.
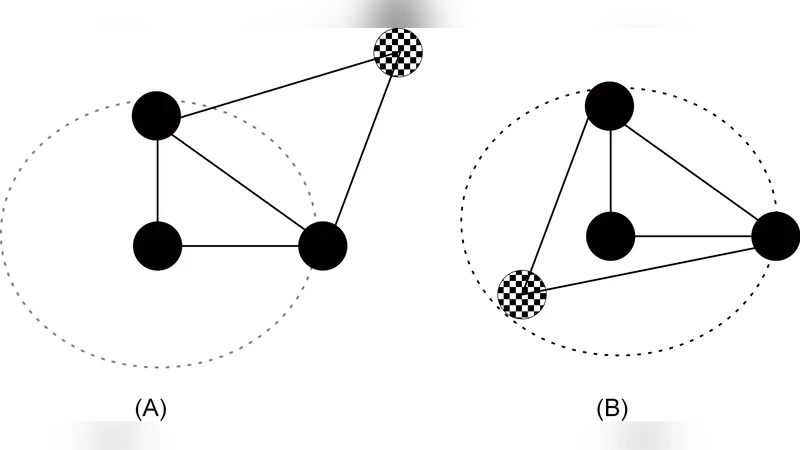
The key insight is that the absence of an edge is itself valuable information. In the classic formulation only existing edges contribute constraints (equality of distances). The authors augment the constraint set with a “non‑edge” condition: for any pair (i, j) that is not an edge, ‖x_i − x_j‖² > r² must hold. This additional inequality dramatically prunes the search space because many candidate placements that would otherwise be considered feasible are instantly ruled out. Moreover, with these extra constraints the requirement of global rigidity is no longer necessary: a graph that is not globally rigid can still have a unique embedding when the non‑edge constraints are taken into account. The paper illustrates this with a counter‑example (Figure 1) where a non‑rigid graph admits a single valid realization once the “no‑connection” rule is enforced.
Based on this reformulation, the authors propose a depth‑first tree‑search algorithm. The algorithm maintains two sets: a realized set R (initially the M anchor nodes) and an unrealized set U (the remaining N − M nodes). At each level it selects a node from U that has at least one neighbor in R (preferring the node with the most such neighbors). For the chosen node j, all integer points that satisfy the distance constraints with its already realized neighbors are enumerated. Because distances are integer, the candidate set is a finite collection of lattice points lying on circles of known radii. Each candidate is immediately validated against three types of constraints: (1) equality constraints for existing edges, (2) inequality constraints for non‑edges (the “no‑connection” rule), and (3) the prohibition of two nodes occupying the same coordinate. Candidates violating any condition are pruned, and the surviving placements generate child nodes in the search tree. The process recurses until U becomes empty; leaf nodes correspond to complete realizations.
The algorithm is optimal in the sense that it explores every placement that satisfies all constraints, and it is complete because any valid embedding must appear as a leaf. The authors prove two lemmas: (i) if the graph is realizable, at least one leaf node will be reached, and (ii) all valid realizations are present among the leaves.
Complexity analysis shows that the worst‑case size of the search tree can be exponential, reflecting the underlying NP‑hardness. However, in practice the tree’s branching factor is heavily limited by the non‑edge constraints, especially in sparse graphs where many node pairs are known to be farther than r. The memory footprint is bounded by O(N) because a depth‑first implementation only needs to store the current path and a small amount of auxiliary data. Empirical simulations on random integer‑grid networks (sizes 30–100 nodes, varying density and anchor count) demonstrate that the proposed method reduces the number of explored nodes by one to two orders of magnitude compared with a formulation that ignores non‑edge information. Runtime typically stays within a few hundred milliseconds, and memory usage remains in the tens of kilobytes, making the approach feasible for moderate‑size networks.
In conclusion, the paper contributes a novel perspective—treating “no connectivity” as a constraint—to the network localization problem. By leveraging the structural properties of unit‑disk graphs and integer lattices, it eliminates the need for global rigidity, offers a tractable depth‑first search algorithm with linear memory, and achieves substantial practical speedups. Future work suggested includes extending the framework to heterogeneous communication ranges, handling noisy distance measurements, and applying the method to non‑grid (continuous) coordinate spaces.
Comments & Academic Discussion
Loading comments...
Leave a Comment