Decision Making for Rapid Information Acquisition in the Reconnaissance of Random Fields
Research into several aspects of robot-enabled reconnaissance of random fields is reported. The work has two major components: the underlying theory of information acquisition in the exploration of unknown fields and the results of experiments on how humans use sensor-equipped robots to perform a simulated reconnaissance exercise. The theoretical framework reported herein extends work on robotic exploration that has been reported by ourselves and others. Several new figures of merit for evaluating exploration strategies are proposed and compared. Using concepts from differential topology and information theory, we develop the theoretical foundation of search strategies aimed at rapid discovery of topological features (locations of critical points and critical level sets) of a priori unknown differentiable random fields. The theory enables study of efficient reconnaissance strategies in which the tradeoff between speed and accuracy can be understood. The proposed approach to rapid discovery of topological features has led in a natural way to to the creation of parsimonious reconnaissance routines that do not rely on any prior knowledge of the environment. The design of topology-guided search protocols uses a mathematical framework that quantifies the relationship between what is discovered and what remains to be discovered. The quantification rests on an information theory inspired model whose properties allow us to treat search as a problem in optimal information acquisition. A central theme in this approach is that “conservative” and “aggressive” search strategies can be precisely defined, and search decisions regarding “exploration” vs. “exploitation” choices are informed by the rate at which the information metric is changing.
💡 Research Summary
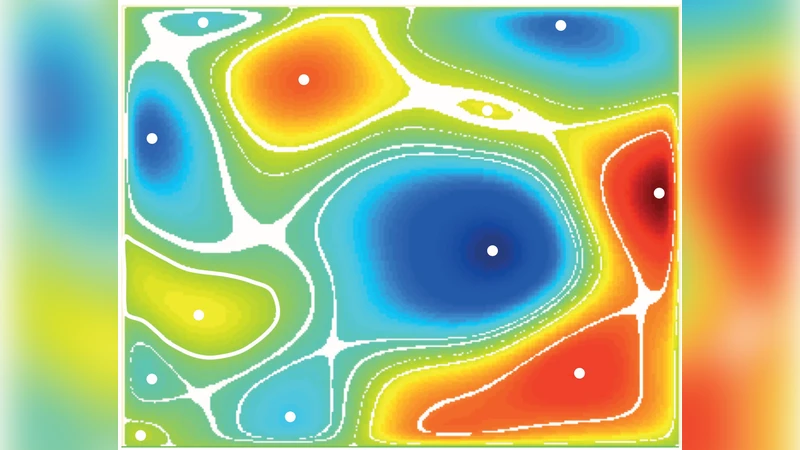
The paper presents a comprehensive framework for rapid information acquisition during the reconnaissance of unknown random scalar fields, focusing on the discovery of topological features such as critical points and critical level sets. The authors combine concepts from differential topology, Morse theory, and information theory to define a novel “topology‑induced partition” of a field, which separates the domain into open cells bounded by critical level sets (maxima, minima, and saddle‑point contours). Each cell’s Euler characteristic provides a topological invariant that can be used to assess the significance of newly acquired data.
To quantify information gain, the authors introduce a data‑induced partition that evolves as a robot maps isolines (contours of constant field value). The Shannon‑like entropy of this partition, H(Vk), measures the uncertainty remaining about the field after k motion programs. Crucially, the paper proves that mapping a new isoline inside a cell whose Euler characteristic is ≤ –1 necessarily reduces uncertainty about the topology‑induced partition, establishing a direct link between topological complexity and information gain.
The robotic exploration strategy is built on two primitive motion laws: (a) gradient‑ascent/descent, which drives the robot along the field’s gradient to locate local maxima and minima, and (b) isoline‑mapping, which follows known contour lines to acquire additional geometric detail. By switching between these primitives, the system implements an explicit exploration‑exploitation trade‑off. A decision criterion based on the rate of change of H(Vk) determines when to continue isoline mapping (conservative behavior) and when to seek new extrema (aggressive behavior). The criterion resembles a simulated‑annealing schedule, with parameters controlling the aggressiveness of the search.
Monte‑Carlo simulations on thousands of synthetic Morse fields compare aggressive and conservative policies. Aggressive policies locate critical points quickly but incur higher total travel distance and map many redundant isolines. Conservative policies acquire topological information more slowly at first but achieve lower overall cost and a smoother entropy reduction curve.
Human performance is evaluated through a custom computer game in which participants act as mission directors, issuing sequences of the two motion primitives to a simulated robot. A “topological bias” metric quantifies each player’s tendency to prioritize topological information. All participants displayed some bias toward topology, but the magnitude varied widely. Players with higher topological bias required fewer isolines to achieve comparable entropy reduction, indicating more parsimonious strategies. Moreover, individual performance was consistent across multiple game rounds, suggesting that humans can learn and refine efficient reconnaissance policies.
The study contributes three major advances: (1) a rigorous topological‑information framework that links field topology to an entropy‑based information metric, (2) a hierarchical control architecture that operationalizes exploration versus exploitation through gradient and isoline motions, and (3) empirical evidence—both simulated and human‑in‑the‑loop—that the proposed strategies are effective and that humans naturally gravitate toward topology‑focused reconnaissance. The authors discuss extensions to multi‑robot cooperation, handling non‑Morse (noisy or discontinuous) fields, and adaptive decision rules for dynamic environments, outlining a rich agenda for future research.
Comments & Academic Discussion
Loading comments...
Leave a Comment