Cooperative Estimation of 3D Target Motion via Networked Visual Motion Observer
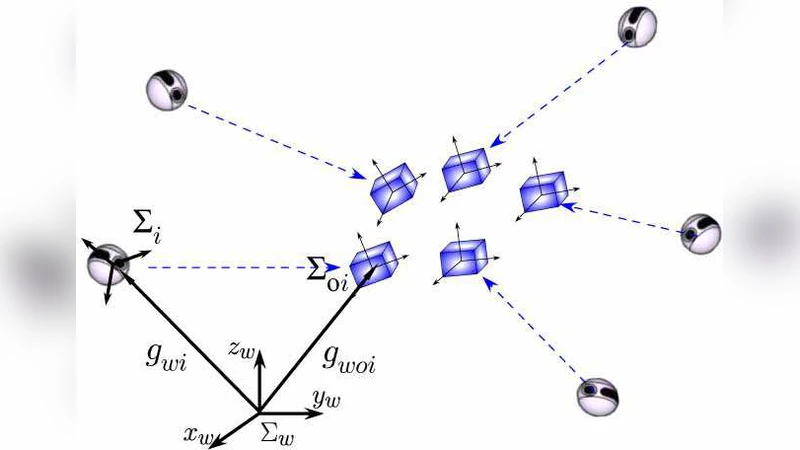
This paper investigates cooperative estimation of 3D target object motion for visual sensor networks. In particular, we consider the situation where multiple smart vision cameras see a group of target objects. The objective here is to meet two requirements simultaneously: averaging for static objects and tracking to moving target objects. For this purpose, we present a cooperative estimation mechanism called networked visual motion observer. We then derive an upper bound of the ultimate error between the actual average and the estimates produced by the present networked estimation mechanism. Moreover, we also analyze the tracking performance of the estimates to moving target objects. Finally the effectiveness of the networked visual motion observer is demonstrated through simulation.
💡 Research Summary
This paper addresses the problem of cooperatively estimating the three‑dimensional motion of target objects observed by a network of smart vision cameras. While many existing works focus on single‑camera visual motion observers that estimate a target’s pose from image measurements, they do not exploit the redundancy and complementary viewpoints available in a visual sensor network. The authors therefore propose a novel “Networked Visual Motion Observer” (NVMO) that simultaneously satisfies two seemingly contradictory requirements: (1) for static objects, each camera’s estimate should converge to the average pose of all observed objects, thereby reducing the effect of measurement noise and occlusions; and (2) for moving objects, the estimates should track the time‑varying average pose with a bounded error.
The technical foundation of the NVMO is a combination of two feedback channels. The first channel is the classic visual feedback used in the visual motion observer (VMO) of
Comments & Academic Discussion
Loading comments...
Leave a Comment