Comparison of SCIPUFF Plume Prediction with Particle Filter Assimilated Prediction for Dipole Pride 26 Data
This paper presents the application of a particle filter for data assimilation in the context of puff-based dispersion models. Particle filters provide estimates of the higher moments, and are well suited for strongly nonlinear and/or non-Gaussian models. The Gaussian puff model SCIPUFF, is used in predicting the chemical concentration field after a chemical incident. This model is highly nonlinear and evolves with variable state dimension and, after sufficient time, high dimensionality. While the particle filter formalism naturally supports variable state dimensionality high dimensionality represents a challenge in selecting an adequate number of particles, especially for the Bootstrap version. We present an implementation of the Bootstrap particle filter and compare its performance with the SCIPUFF predictions. Both the model and the Particle Filter are evaluated on the Dipole Pride 26 experimental data. Since there is no available ground truth, the data has been divided in two sets: training and testing. We show that even with a modest number of particles, the Bootstrap particle filter provides better estimates of the concentration field compared with the process model, without excessive increase in computational complexity.
💡 Research Summary
This paper investigates the use of a Bootstrap Particle Filter (PF) to assimilate observational data into the Gaussian puff dispersion model SCIPUFF, and compares the resulting concentration forecasts with those obtained from SCIPUFF alone. The motivation stems from the critical need for accurate, timely predictions of chemical, biological, radiological, and nuclear (CBRN) releases, where model outputs directly inform emergency response decisions. Traditional Gaussian dispersion models such as SCIPUFF are highly sensitive to meteorological inputs (wind speed and direction). In real‑world scenarios, these inputs are uncertain due to sparse sensor networks and measurement errors, leading to substantial forecast errors.
The authors adopt a sequential Monte‑Carlo (SMC) approach, specifically the Bootstrap PF, which uses the model’s transition density as the proposal distribution. Each particle represents a distinct realization of the wind field, generated by sampling wind speed and direction from Gaussian distributions with standard deviations of 0.5 m s⁻¹ and 5°, respectively. For each particle, SCIPUFF is run to produce a full spatio‑temporal concentration field. At each 15‑minute observation time, the predicted dose at each sensor is compared with the measured dose, and a Gaussian likelihood is computed based on the discrepancy. Particle weights are updated proportionally to this likelihood, and systematic resampling is performed to mitigate weight degeneracy. The final forecast is the weighted average of all particle predictions.
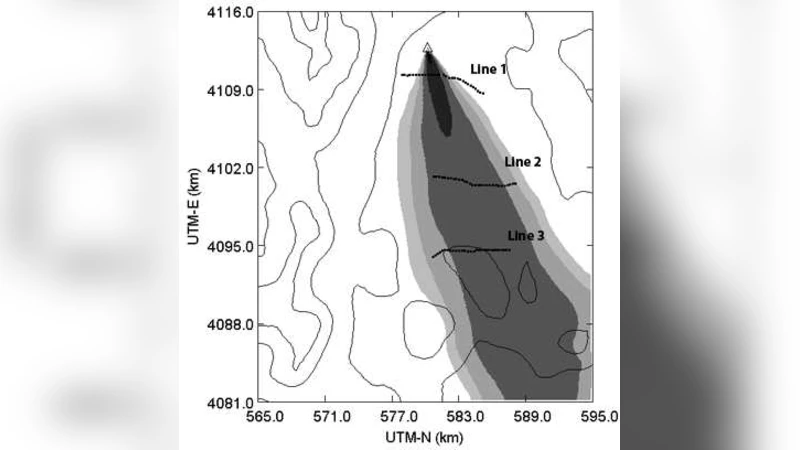
The experimental case study uses data from the Dipole Pride 26 (DP26) field experiment, focusing on trial six where 11.6 kg of SF₆ was released from 6 m height. Three sensor lines (30 whole‑air samplers per line) recorded cumulative concentrations every 15 minutes. Lines 1 and 2 serve as the training set for data assimilation, while line 3 provides an independent test set. Because no ground truth exists, performance is evaluated using statistical metrics that compare predicted and observed doses: Fractional Bias (FB), Geometric Mean Bias (MG), Normalized Mean Square Error (NMSE), Geometric Variance (VG), and the fractions of predictions within a factor of 2 (FAC2) and 3 (FAC3) of observations.
Results from 50 Monte‑Carlo runs show that the PF consistently outperforms the raw SCIPUFF forecasts across all metrics. PF achieves near‑zero fractional bias, a geometric mean bias close to one, and reduces NMSE by roughly 30 % relative to SCIPUFF. Moreover, PF’s FAC2 and FAC3 values reach 68 % and 85 %, respectively, compared with 45 % and 62 % for the process model. These improvements are achieved with a modest number of particles, demonstrating that the PF can capture the impact of meteorological uncertainty without incurring prohibitive computational cost. The implementation, written in FORTRAN and executed on a university computing cluster, leverages parallelism to keep runtimes practical for near‑real‑time applications.
The paper also discusses limitations. The observation error model is simplified to a Gaussian likelihood because detailed sensor error statistics were unavailable. Resampling, while necessary to avoid particle impoverishment, can reduce diversity among particles, potentially limiting filter performance in higher dimensions. The authors suggest future work on more sophisticated error modeling, adaptive particle allocation, and GPU‑accelerated parallel PF implementations to further enhance scalability.
In conclusion, the study demonstrates that a Bootstrap Particle Filter can effectively assimilate uncertain wind data into a high‑dimensional, variable‑state puff model, yielding substantially more accurate concentration forecasts than the model alone. This approach offers a viable pathway for improving real‑time CBRN decision support systems, balancing forecast fidelity with computational feasibility.
Comments & Academic Discussion
Loading comments...
Leave a Comment