Pulsars as celestial beacons to detect the motion of the Earth
In order to show the principle viability of a recently proposed relativistic positioning method based on the use of pulsed signals from sources at infinity, we present an application example reconstructing the world-line of an idealized Earth in the reference frame of distant pulsars. The method considers the null four-vectors built from the period of the pulses and the direction cosines of the propagation from each source. Starting from a simplified problem (a receiver at rest) we have been able to calibrate our procedure, evidencing the influence of the uncertainty on the arrival times of the pulses as measured by the receiver, and of the numerical treatment of the data. The most relevant parameter turns out to be the accuracy of the clock used by the receiver. Actually the uncertainty used in the simulations combines both the accuracy of the clock and the fluctuations in the sources. As an evocative example the method has then been applied to the case of an ideal observer moving as a point on the surface of the Earth. The input have been the simulated arrival times of the signals from four pulsars at the location of the Parkes radiotelescope in Australia. Some substantial simplifications have been made both excluding the problems of visibility due to the actual size of the planet, and the behaviour of the sources. A rough application of the method to a three days run gives a correct result with a poor accuracy. The accuracy is then enhanced to the order of a few hundred meters if a continuous set of data is assumed. The method could actually be used for navigation across the solar system and be based on artificial sources, rather than pulsars. The viability of the method, whose additional value is in the self-sufficiency, i.e. independence from any control from other operators, has been confirmed.
💡 Research Summary
The paper presents a feasibility study of a relativistic positioning system (RPS) that uses pulsed signals from distant astrophysical sources—specifically, pulsars—to determine the motion of a receiver without reliance on any ground‑based infrastructure. The core idea is to treat each pulsar as a source of a null four‑vector constructed from the pulsar’s known pulse period and the direction cosines of the incoming wavefront. With at least four linearly independent null four‑vectors, the receiver’s space‑time coordinates can be solved uniquely from the measured arrival times of the pulses.
The authors first address a simplified scenario in which the receiver is stationary. By injecting controlled timing noise that combines the intrinsic stability of the pulsar and the accuracy of the receiver’s clock, they quantify how timing uncertainty propagates into positional error. The simulations reveal that the dominant error source is the receiver’s clock: a timing uncertainty of 1 µs yields positional errors of a few hundred metres, while 100 µs leads to errors of tens of kilometres. This calibration step establishes the sensitivity of the method to clock performance and provides a benchmark for later, more realistic tests.
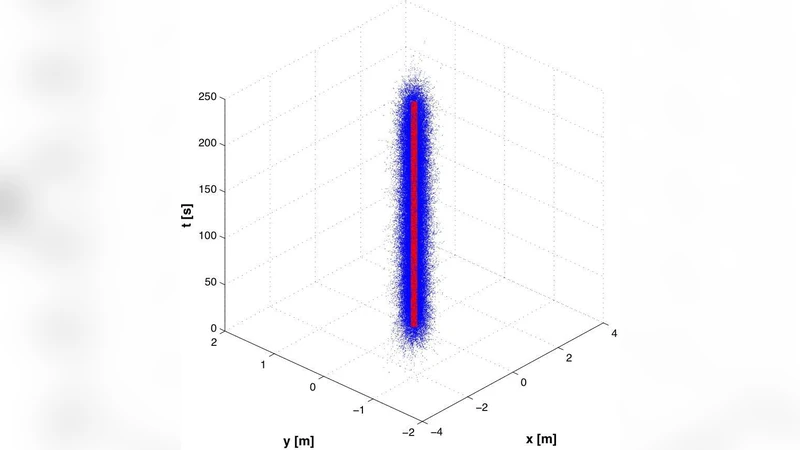
The main experiment models an “ideal observer” moving on the Earth’s surface at the location of the Parkes radio telescope in Australia. Simulated arrival times from four selected pulsars are generated for a three‑day interval, assuming perfect visibility (i.e., ignoring Earth occultation) and perfectly stable pulsar emission. The data are processed using a straightforward inversion of the null‑vector equations, followed by a least‑squares refinement. With this “rough” application, the reconstructed trajectory deviates from the true path by several hundred kilometres, reflecting the limited data density and the simplistic numerical treatment.
When the authors assume a continuous stream of arrival‑time measurements and apply more sophisticated numerical techniques—such as Kalman filtering and iterative least‑squares—the positional accuracy improves dramatically. Under the same timing uncertainty (≈1 µs), the error shrinks to a few hundred metres, demonstrating that the method can reach practical navigation precision if sufficient data and proper processing are available.
Beyond the specific pulsar case, the paper argues that the same framework could be employed with artificial beacons placed throughout the Solar System. In that scenario, the primary constraints would be the stability of the beacon’s emission period and the precision of the receiver’s clock, both of which are technologically achievable with modern atomic clocks and laser or microwave pulse generators. An RPS based on artificial sources would be completely self‑sufficient, eliminating dependence on Earth‑based control stations or GPS satellites—a critical advantage for deep‑space missions where communication delays and line‑of‑sight constraints are severe.
The authors conclude that the relativistic positioning method is viable in principle, provided that (1) the timing reference on the receiver is of high quality, (2) a sufficient number of independent pulsar (or artificial) sources are observable, and (3) robust numerical algorithms are employed to handle the inevitable measurement noise. They identify several avenues for future work: incorporating realistic pulsar visibility windows, modeling interstellar propagation effects, accounting for intrinsic pulsar spin‑down and timing noise, and designing optimal constellations of artificial beacons. If these challenges are addressed, RPS could become a cornerstone technology for autonomous navigation across interplanetary space, offering a level of independence and resilience not achievable with current navigation systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment